
huge swings in rpy with robot_localization when inputs are relatively benign? [closed]
I'm having some issue tuning my robot localization params. For some reason, when I feed the imu rpy, I get some really big swings in the values that don't match my input at all.
See below:
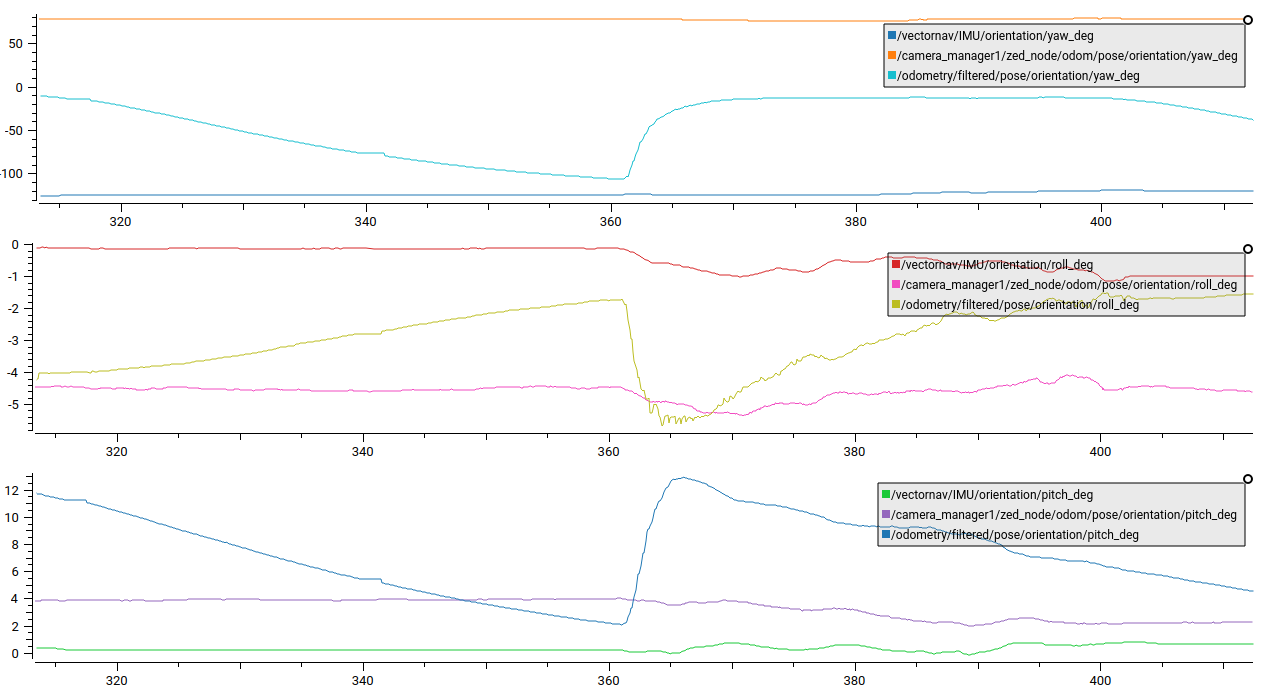
I am actually only providing a single measurement for rpy from the /vectornav/IMU. Does this mean that my ekf is not trusting the measurement enough? That I need to tune the process covariance matrix?
My yaml is below:
initial_state: [0.0, 0.0, 0.59,
0.0, 0.0, 0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0]
frequency: 10
two_d_mode: false
transform_time_offset: 0.2
transform_timeout: 0.0
print_diagnostics: false
debug: false
debug_out_file: /tmp/debug.txt
publish_tf: true
publish_acceleration: false
predict_to_current_time: true
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_link # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: wheel_odom
#only use velocities from wheel_odom, abs val are erroneous due to slip. only vx,vy and vyaw
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, false,
false, false, false]
odom0_queue_size: 5
odom0_differential: false
odom0_relative: false
use_control: false
#bottom facing VO camera
#using everything from vo for now
odom1: /camera_manager1/zed_node/odom
odom1_config: [true, true, true,
false,false, false,
false,false, false,
false,false, false,
false,false, false]
odom1_differential: false
odom1_relative: false
#
imu0: /vectornav/IMU
#The IMU gives orientation, linear acceleration, and angular velocity
#use imu for velocity for vx,vy,vz, vrpy
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, false,
false, false, false]
imu0_differential: false
imu0_relative: true
imu0_remove_gravitational_acceleration: true

Could you provide some data to check the configuration? Maybe a small bag file?
Seconded. Please provide a sample message from every sensor input.
see this post for the update: https://answers.ros.org/question/3664... I'll close this one. thanks!