Hi @rosli an Update of my previous answer with the solution:
Here to send the solution for some users that faced the same issue.
The tutorials that I have followed and described above in my question are WRONG! If you launch the costmap_generator through the runtime manager or terminal, the occupancy grid map will not be generated or very very rarely....
To fix this there are 2 options:
1). Using Run-time Manager: on Computing Tab click over app option in costmap_generator, scroll down until you find the Lanelet2 checkbox option at the left bottom. CHECK this box ✔️
2) Inside the docker, using a new terminal launch:
roslaunch costmap_generator costmap_generator_lanelet2.launch
Ok now the costmap_generator will generate the occupancy_grid_map
3) Just Pay attention that you must check the ray_ground filter or compare_map_filter on Sensing Tab
However this will not help as the A* keeps not avoiding and crashing the Obstacle, as described in my issue: #2387
If someone fix this A* please let me know
Hi before reading after the dashed line below, check this video I have recorded:
https://www.youtube.com/watch?v=9gbq6...
I have followed the step-by-step from this documentation, to generate the occupancy_grid map:
https://gitlab.com/autowarefoundation...
The issue here is that the Perception module on Autoware.AI project is not robust (Fails 8 from 10 attempts to use it)
Another issue is that this module requires a very high computational power.I was not able to use it on my notebook with the LG simulator. Then I needed to rent a very powerful/ cloud machine on paperspace.com or run a distributed simulation (desktop/notebook):
https://answers.ros.org/question/3758...
If you run in powerful machines the Planner will receive the data from the semantics/costmap_generator_occupancy_grid topic.
However as I said the module is not robust and will fail a lot. Also to update and generate new obstacles, while the car moves, into the occupancy grid. It does not get update...(you can check this behaviour in youtube video link above).
A possible reason for this, is that each revolution of velodyne get 1.200.000 points and need to be very correctly filtered as this specialist suggest in his course:
https://www.coursera.org/learn/motion....
If you be interested how I debugged this error from the beginning read the lines below:
Hi is this in Autoware.AI?
Did you figure out how to get the data?
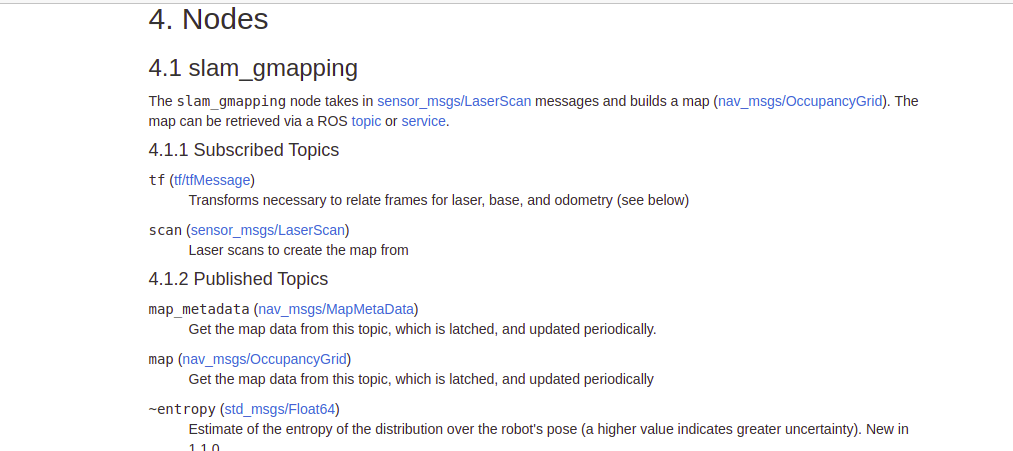
I suspect that the laser scan is the responsible to get this data and publish on occupancy grid map, according to http://wiki.ros.org/gmapping:
And if we inspect the topic nav_msgs/OccupancyGrid. We can check that it is really not subscribing to any LaserScan data, or better there is not any LaserScan topic publisher, publishing into nav_msgs/OccupancyGrid:
$ rostopic info /semantics/costmap_generator/occupancy_grid
Type; nav_msgs/OccupancyGrid
Publishers: None
Subscribers:
* /rviz_1619807356229344627 (http://local-host:38799/)
I was taking a look into the file shared_dir/autoware-data/BorregasAvemy_launch/my_sensing_simulator.launch :
<launch>
<!-- ROS-Bridge node for Simulator connection ...
(more)


hey @rosli I have updated my question. I believe I have found the answer from your doubt.Could you please close it if you accept it? Thanks :)