
Do I have to create an omni_drive_controller?

Hi there,
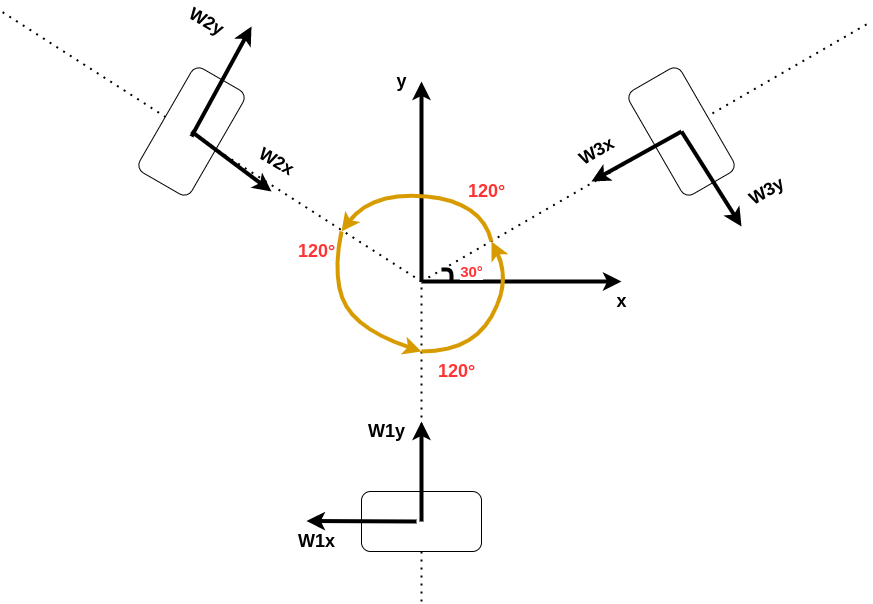
I have to create something like diff_drive_controller but for a 3 omnidirectional robot (Killough platform)?
I tried with velocity_controllers/JointVelocityController and a .cpp file with the motion kinematics but the output result in gazebo was not what I expected (it wasn't smooth compared to the planar_move of the gazebo_plugin) vide0.

I meet the same problem about this. So even if you have written the plugin, how do you plan to make the navigation? The navigation needs to control the three-wheel and move_base can not do it. It is really difficult.