
integration of visual map and occupency grid map

Currently i am using the amcl to localize the robot w.r.t to global map i.e the 2d occupency grid created by the slam previously.
Here the tf was comming as below:
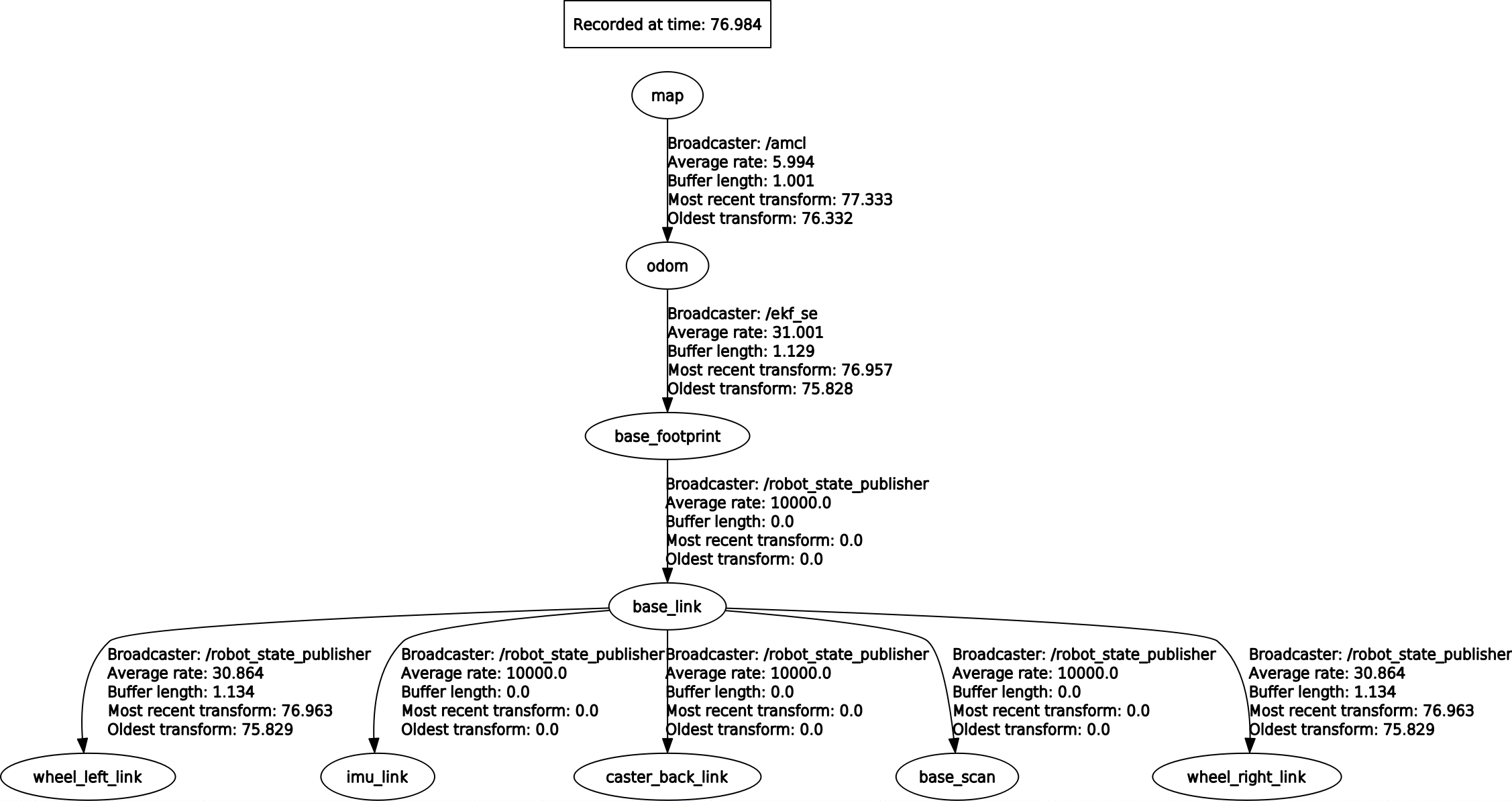 Here amcl is determining the location of given robot odom frame w.r.t global map frame.
Now i also want to use the visual slam based map to localize the robot but i'm little confused how to integrate the visual slam based odometry.
considering the visual slam based odometry eg. v_slam frame is present which is determining the position of camera_link. How should i merge this two global frames i.e map i.e comming from amcl and v_map which is comming from openvslam or orb slam etc.
Plate-form : ubuntu 20.04, ros noetic.
Here amcl is determining the location of given robot odom frame w.r.t global map frame.
Now i also want to use the visual slam based map to localize the robot but i'm little confused how to integrate the visual slam based odometry.
considering the visual slam based odometry eg. v_slam frame is present which is determining the position of camera_link. How should i merge this two global frames i.e map i.e comming from amcl and v_map which is comming from openvslam or orb slam etc.
Plate-form : ubuntu 20.04, ros noetic.

Have you considered using amcl to generate the map->odom tf and visual odometry to generate the odom->base_link tf?
well i haven't. But is that the standard and correct way?
As I understand it, yes.