
clear the global costmap inside local costmap

How to clear the global costmap inside the laserscan range such that even if the robot is not accuratly localizing itself within that globl map it will not consider the global costsmap inside the local as ... obstacle?
Due to this problem my robot is unable to make a clean path from the gaps and move to the destination location. Even if the global costmaps are not correctly aligned with the local.
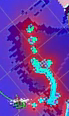
For example below screenshoht shows the alighment of local costmp creted by the laserscan to the global made by the map. I'm afraid that if i remove the global costmap all, the robot will also make the path from the gaps from where the robot can't actually enter.
add a comment
