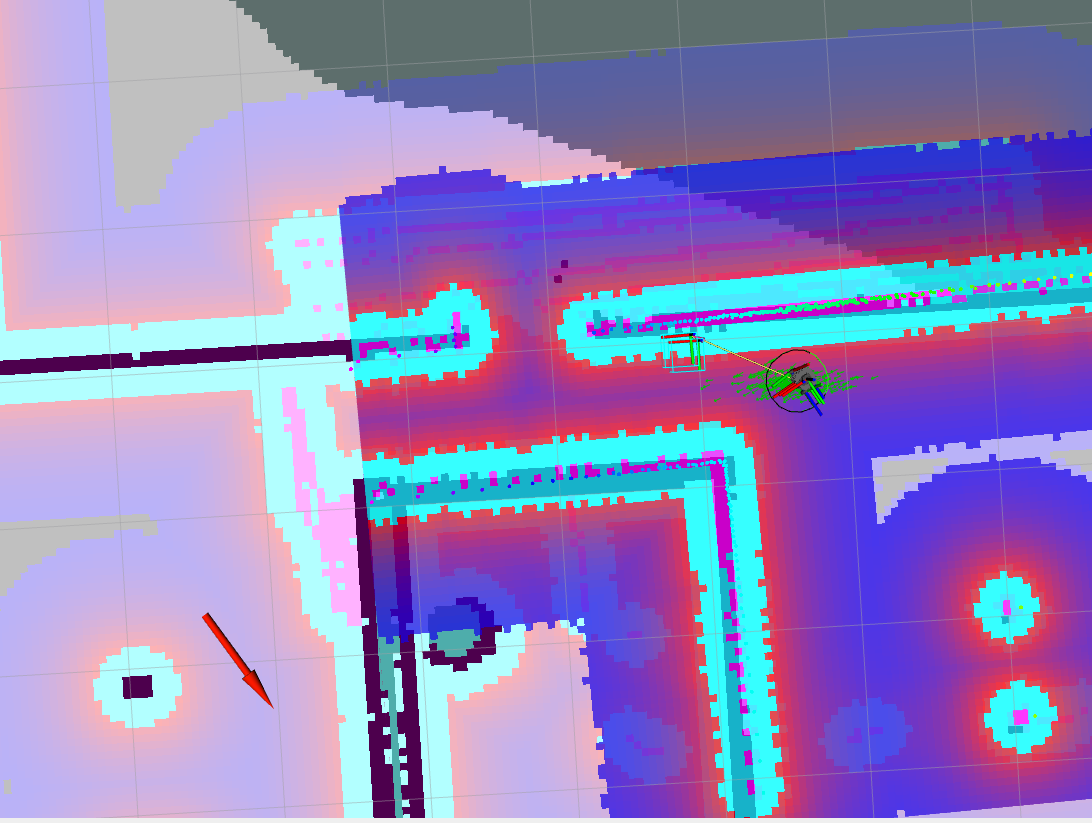
It looks like your sensor data are not clearing the global cost map there. These ROS wiki pages will give you more information:
I recommend ensuring that the clearing parameter of your sensor(s) is set to true and your raytrace_range is large enough as in this example:
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[x0, y0], [x1, y1], ... [xn, yn]]
#robot_radius: ir_of_robot
inflation_radius: 0.55
observation_sources: laser_scan_sensor point_cloud_sensor
laser_scan_sensor: {sensor_frame: frame_name, data_type: LaserScan, topic: topic_name, marking: true, clearing: true}
point_cloud_sensor: {sensor_frame: frame_name, data_type: PointCloud, topic: topic_name, marking: true, clearing: true}
One way to troubleshoot this issue is to move the robot closer to the blocked area and see if short-range sensor data clears it. If these parameters don't fix the issue, please, post your configuration files and the result of moving closer to the blockage.