
Robot keeps going Off-Map

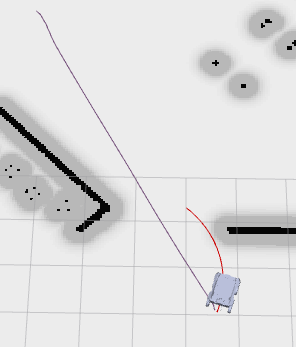
I am simulating a skid-steer AGV and the robot keeps on diverting absurdly from the global path. However, for smaller velocity (< 0.5 m/s), it follows the global path.
The bot doesn't rotate instantly or with greater speed towards goal-point. Even if I increase
max_vel_thetait takes around 8 seconds to rotate the bot to the goal-point, however, it should take not more than 3 seconds to orient to the goal-point.
I am using global_planner and DWA local planner. Here are the tuned parameters so far:
dwa_local_param.yaml
DWAPlannerROS:
max_vel_trans: 2.0
min_vel_trans: 0.02
max_vel_x: 3.0
min_vel_x: 0.0
# max_rot_vel: 5.0
# min_rot_vel: 0.5
acc_lim_x: 3.0
acc_lim_theta: 3.0
acc_lim_trans: 3.0
max_vel_theta: 3.0
min_vel_theta: -3.0
holonomic_robot: false
acc_lim_y: 0.0
min_vel_y: 0.0
max_vel_y: 0.0
vy_samples: 0
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.3
# latch_xy_goal_tolerance: true
trans_stopped_vel: 0.1
theta_stopped_vel: 0.1
forward_point_distance: 0.5
sim_time: 1.5
vx_samples: 30
vy_samples: 0
vth_samples: 40
path_distance_bias: 64 # 32
goal_distance_bias: 30
occdist_scale: 0.02
stop_time_buffer: 0.5
oscillation_reset_dist: 0.05
prune_plan: true
base_local_param.yaml
TrajectoryPlannerROS:
max_vel_x: 2.0
min_vel_x: 0.1
max_vel_trans: 2.0
min_vel_trans: 0.01
max_vel_theta: 3.0
min_vel_theta: -3.0
min_in_place_vel_theta: 1.5 # 0.6
acc_lim_theta: 3.2
acc_lim_x: 3.0
acc_lim_y: 3.0
holonomic_robot: false
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1 # pi
xy_goal_tolerance: 0.3 # 0.15
# Forward Simulation Parameters
sim_time: 1.5
vx_samples: 20 # 6
vtheta_samples: 20
# Trajectory Scoring Parameters
meter_scoring: true
pdist_scale: 1.0 #0.6
gdist_scale: 1.0 #0.8
occdist_scale: 0.01
heading_lookahead: 0.325
dwa: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05
# Differential-drive robot configuration
max_vel_y: 0.0
min_vel_y: 0.0
acc_lim_y: 0.0
vy_samples: 1
global_planner.yaml
GlobalPlanner:
allow_unknown: false
default_tolerance: 0.5
visualize_potential: true
use_dijkstra: true
use_quadratic: true
use_grid_path: false
old_navfn_behavior: false
neutral_cost: 66
cost_factor: 0.55
lethal_cost: 253
last_plan_if_blocked: true

add a comment
