
Rviz unstable rendering

I am learning URDF creation and having arrived at the end of the R2D2 tutorial, I found Rviz unstable and "gittery" in how it's rendering my robot simulation. I am using the Joint-State-Publisher GUI to publish data to the continueous and revolt joints but the movements are far from smooth and hindering proper testing.
Link to a short video showing the unhelpful behaviour I am trying to resolve.
UPDATE:
Thank you @gvdhoorn You are correct!
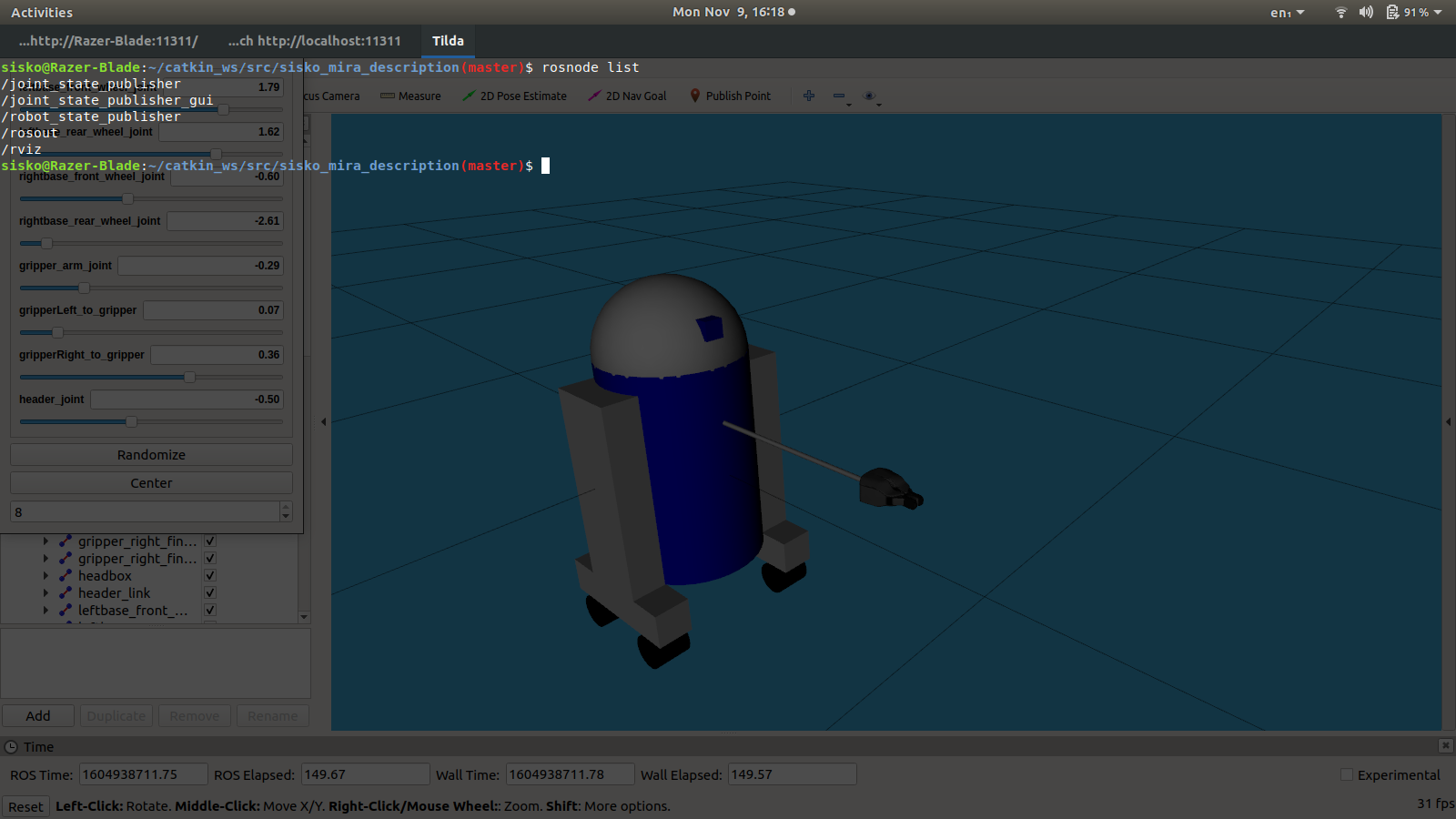
The rosnode list output does show is a joint_state_publisher node and a joint_state_publisher_gui node.
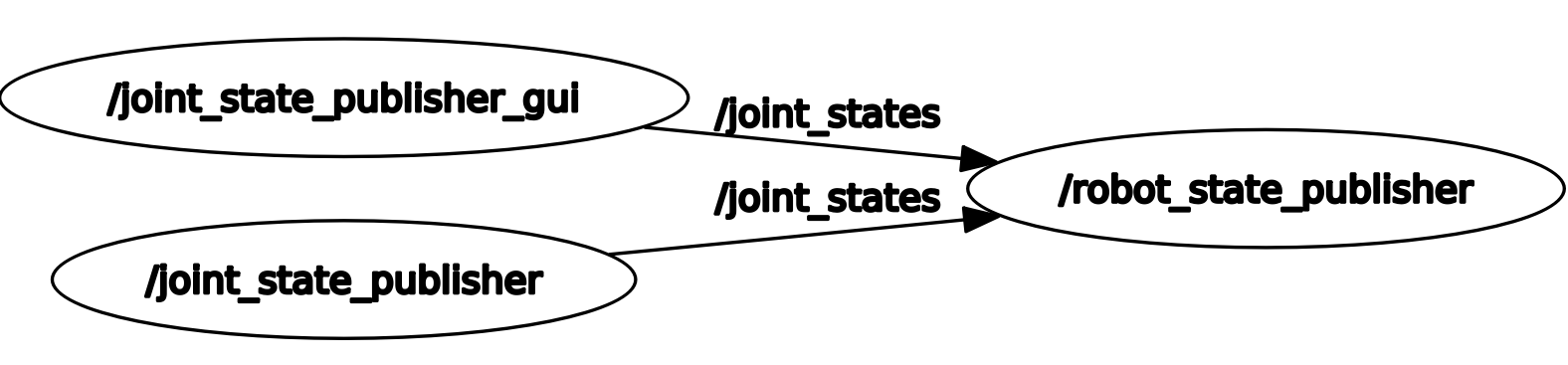
RQT-Graph output:
add a comment
