
Problem with generating the map
Hello there,
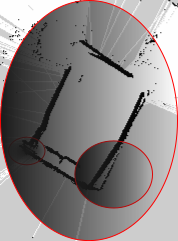
I'm currently working on a three omni-wheel robot. After running hector_slam and navigating my robot slowly with the keyboard through the map I ended up with this.
I'm wondering about the quality of the present map inside the red circles or needs something to be fixed what kind of action I have to do in order to fix it.
Any help will be appreciated!
Thank you!


Think about driving as slow as possible when you are collecting the map, driving too fast usually degrades the quality of my maps
2nd what Jack says about slow is better. If you do any rotating, that is especially important to do slowly while mapping.
I am currently driving with approximately 0.2 m/s both linear and angular. I would like to hear your advice on how to improve my map's quality, do I have to modify only hector_slam's parameters?
0.2m/s is about how I do linearly, and then rotation I do really slowly. I have a robot vacuum cleaner LIDAR (5Hz on a good day) and to get good results I need to rotate painfully slow. I understand you're not interested in hearing to go slowly, but that is what we have for you based on our experience with real HW doing real mapping. When I used Hector I don't remember doing anything special to any parameters out of standard setup in the tutorial.
I agree with @billy, and don't think (unless you are a super user) that you will need to edit the parameters. The out of the box configurations for slam packages I use work reasonably well. I think driving "painfully" slow is your best bet. If that doesn't help at all, then maybe consider if the rest of your system is in working order and that you are not compute limited. Please keep us updated here.
@al_ca did you find a solution to your problem?
I didn't find the solution that I wanted, I mean a map with not so much noise but the advice you gave me helped me a lot reduce the noise, so thank you!
@al_ca if you think the answer that I just put below answers your original question "accept" it, or please post your own answer more full explaining your experience so that future users can benefit from your question. Good luck!