
mono camera calibration for a camera mounted on the robot in gazebo [closed]
i am trying to calibrate camera mounted on the robot simulated using gazebo, in order to get extrinsic parameters. i had the calibration window but without any action " rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.05 image:=/camera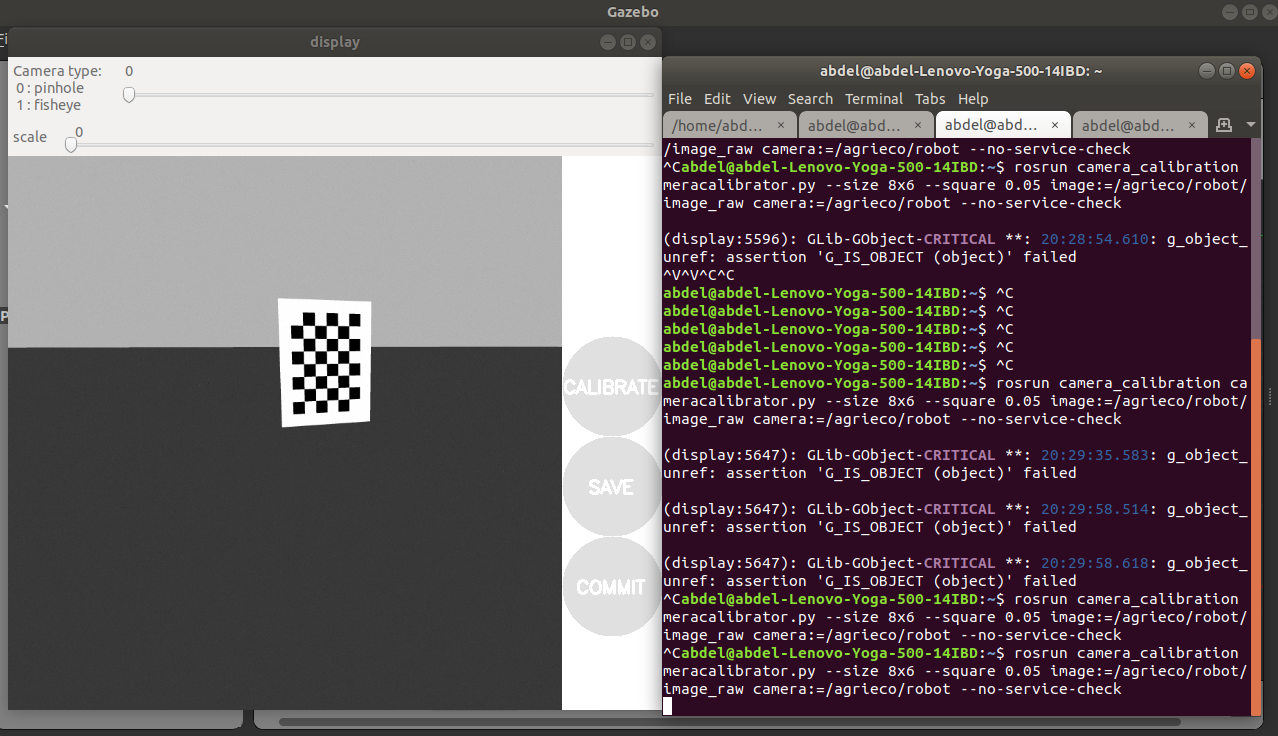 /robot/image_raw camera:=/camera/robot --no-service-check" . and i got sometimes this error : " (display:5647): GLib-GObject-CRITICAL **: 20:29:58.618: g_object_unref: assertion 'G_IS_OBJECT (object)' failed"
/robot/image_raw camera:=/camera/robot --no-service-check" . and i got sometimes this error : " (display:5647): GLib-GObject-CRITICAL **: 20:29:58.618: g_object_unref: assertion 'G_IS_OBJECT (object)' failed"
Closed for the following reason
duplicate question by
leogeo
close date 2020-10-02 05:15:42.186847
add a comment
