catkin_make had different include path from catkin_make_isolated
I am trying to port some packages from a catkin_make (CM) build system to a catkin_make_isolated (CMI) build system. I need the build to be valid using both CM and CMI to support some legacy tooling. My package is currently building in CMI, but not in CM. This surprises me since I would think CMI would be the harder tool to get working. It seems CM can't find my header file, but CMI can.
The following error appears with CM only when building a package which imports my library
fatal error: cav_driver_utils/driver_wrapper/driver_wrapper.h: No such file or directory
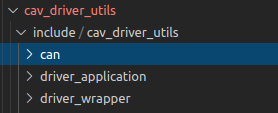
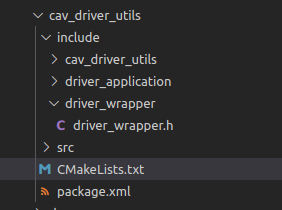
The library has the following structure
The libraries CMakeLists file looks like this
cmake_minimum_required(VERSION 2.8.3)
project(cav_driver_utils)
add_compile_options(-std=c++11)
set( CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall")
set( CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall")
find_package(catkin REQUIRED COMPONENTS
bondcpp
cav_msgs
cav_srvs
roscpp
std_msgs
)
find_package(Boost REQUIRED system)
catkin_package(
INCLUDE_DIRS include
LIBRARIES driver_application cav_socketcan_interface ros_socketcan_interface driver_wrapper
CATKIN_DEPENDS bondcpp cav_msgs cav_srvs roscpp std_msgs
DEPENDS Boost
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_library(driver_application
src/driver_application/driver_application.cpp
include/driver_application/driver_application.h)
add_dependencies(driver_application ${catkin_EXPORTED_TARGETS})
target_link_libraries(driver_application ${catkin_LIBRARIES})
add_library(cav_socketcan_interface
src/socketcan_interface/socketcan_interface.cpp
include/cav_driver_utils/can/socketcan_interface/socketcan_interface.h)
add_dependencies(cav_socketcan_interface ${catkin_EXPORTED_TARGETS})
target_link_libraries(cav_socketcan_interface ${Boost_LIBRARIES})
add_library(ros_socketcan_interface
src/ros_socketcan_bridge/ros_socketcan_bridge.cpp
include/cav_driver_utils/can/ros_socketcan_bridge/ros_socketcan_bridge.h)
add_dependencies(ros_socketcan_interface ${catkin_EXPORTED_TARGETS})
target_link_libraries(ros_socketcan_interface ${Boost_LIBRARIES})
add_library(driver_wrapper
src/driver_wrapper/driver_wrapper.cpp
include/driver_wrapper/driver_wrapper.h)
add_dependencies(driver_wrapper ${catkin_EXPORTED_TARGETS})
target_link_libraries(driver_wrapper ${catkin_LIBRARIES})
install(TARGETS driver_application driver_wrapper cav_socketcan_interface ros_socketcan_interface
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(DIRECTORY include/cav_driver_utils/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
)
install(DIRECTORY include/driver_application
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
)
install(DIRECTORY include/driver_wrapper
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
)
The only thing I can think of that would cause CM to fail but not CMI is if CM installs headers to slightly different default locations. Is that the case?
I'm using
Ubuntu 16.04
ROS1 Kinetic
GCC version 5.4.0
cmake version 3.5.1
Edit: I setup a smaller testing package to evaluate the issue and found the following behavior: With catkin_make my package header was found at
#include <my_package/my_package.h>
With catkin_make_isolated my package header was found at
#include <my_package/my_package/my_package.h>
It seems that catkin_make_isolated is applying an additional folder into the build structure. How can I control that?