Race circuit line extraction

Hello,
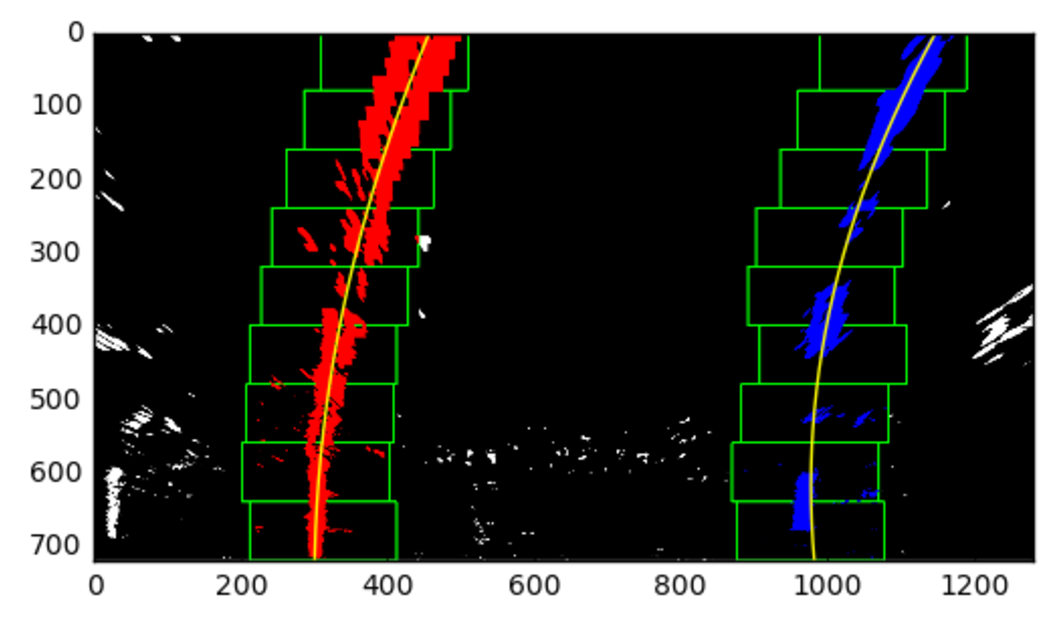
I am looking for information on getting the image below. It is an image of a circuit/race-track, with curved and straight lines. I am trying to mask the image in order to only track the border lines of the circuit. I believe it has been taken with a monocular camera.
I have checked the hough transform but it seems it only detects straight lines.

Any comment is welcomed. Thank you!
add a comment