
What should I do next with the ros_canopen when I stuck in how to change the motor velocity
I am confused on the problem I met.First here is my configuration.
When I use roslaunch test.launch Then I am stuck in what the picture shows to you:
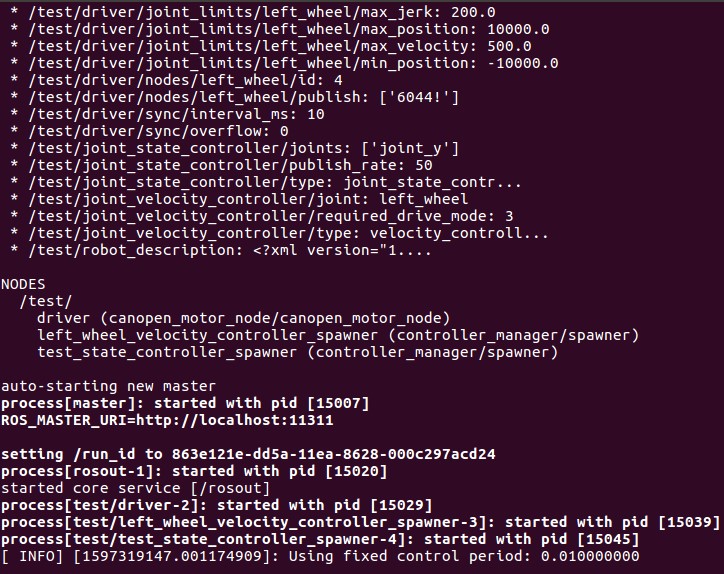
It's stuck here and don't move,what should I do to make the motor move ?(This is the first problem)
Then I am confused on the problem that I want use the ros_canopen to control BLDC. How can I change the velocity of the motor ? I intend to use the linux as a canopen master , I can change the VI target velocity(6042h:00h) of master's dictionary, then the master can change the velocity of the motor by PDO. Or ros_canopen use the ros_control to change the motor velocity, if yes, what the launch file or ros instruction is ?(This is the second problem)
The test.launch:
<?xml version="1.0"?>
<launch>
<arg name="name" value="test"/>
<include file="$(find myrobot)/launch/can/test.xml">
<arg name="name" value="$(arg name)"/>
</include>
</launch>
Here is my test.xml:
<?xml version="1.0"?>
<launch>
<arg name="name"/>
<arg name="timeout" default="180" /> <!-- Timeout (s) for the controller spawners -->
<!-- drivers -->
<node ns="$(arg name)" name="driver" pkg="canopen_motor_node" type="canopen_motor_node" output="screen" clear_params="true" launch-prefix="">
<rosparam command="load" file="$(find myrobot)/cfg/can_conf.yaml" />
<rosparam command="load" file="$(find myrobot)/cfg/test_limits.yaml" />
<remap from="joint_states" to="/joint_states"/>
</node>
<!-- controllers -->
<rosparam ns="$(arg name)" command="load" file="$(find myrobot)/cfg/test_controller.yaml" />
<node ns="$(arg name)" name="left_wheel_velocity_controller_spawner" pkg="controller_manager" type="spawner" args="--stopped joint_velocity_controller --timeout $(arg timeout)" />
<node ns="$(arg name)" name="$(arg name)_state_controller_spawner" pkg="controller_manager" type="spawner" args="joint_state_controller" />
<!-- send urdf to param server -->
<group ns="$(arg name)">
<param name="robot_description" command="xacro --inorder '$(find myrobot)/cfg/myrobot.urdf.xacro'" />
</group>
</launch>
Here is my can_conf.yaml:
bus:
device: can0
sync:
interval_ms: 10
overflow: 0
defaults: # optional, all defaults can be overwritten per node
### 301
eds_pkg: myrobot # optionals package name for relative path
eds_file: "cfg/CL4-E-2-12.eds" # path to EDS/DCF file
dcf_overlay:
"3202": "65"
motor_allocator: canopen::Motor402::Allocator # select allocator for motor layer plugin
motor_layer: # settings passed to motor layer (plugin-specific)
switching_state: 2 # (Switched on), state for mode switching
monitor_mode: true # read operation mode in every cycle
nodes:
left_wheel:
id: 4
publish: ["6044!"]
Here is my test_limits.yaml:
joint_limits:
left_wheel:
has_position_limits: true
min_position: -10000.0
max_position: 10000.0
has_velocity_limits: true
max_velocity: 500.0
has_acceleration_limits: true
max_acceleration: 10.0
has_jerk_limits: true
max_jerk: 200.0
has_effort_limits: true
max_effort: 100.0
Here is my test_controller.yaml:
joint_velocity_controller:
type: velocity_controllers/JointVelocityController
joint: left_wheel
required_drive_mode: 3
joint_state_controller:
type: joint_state_controller/JointStateController
joints: [left_wheel]
publish_rate: 50
Here is my myrobot.urdf.xacro:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="myrobot">
<link name="base_link">
<visual>
<geometry>
<box size="5.0 0 ...
Did you call the init service? (http://wiki.ros.org/canopen_chain_nod...)
And in general: ROS answers only show the beginning of a question, if it is very long. Better put your problem/question first.