
Odom TF goes Wrong

I try to make a diferential drive robot. When i try to navigate it , i get something wrong. I guess odom tf goes wrong.
I drive my robot forward direction. However my odom tf goes backward? What should happen the odom tf, when i drive forward direction ? Should odom tf stick the robot (base_footprint ) , should it stay with with map tf on initial position.
What is responsible for that ?
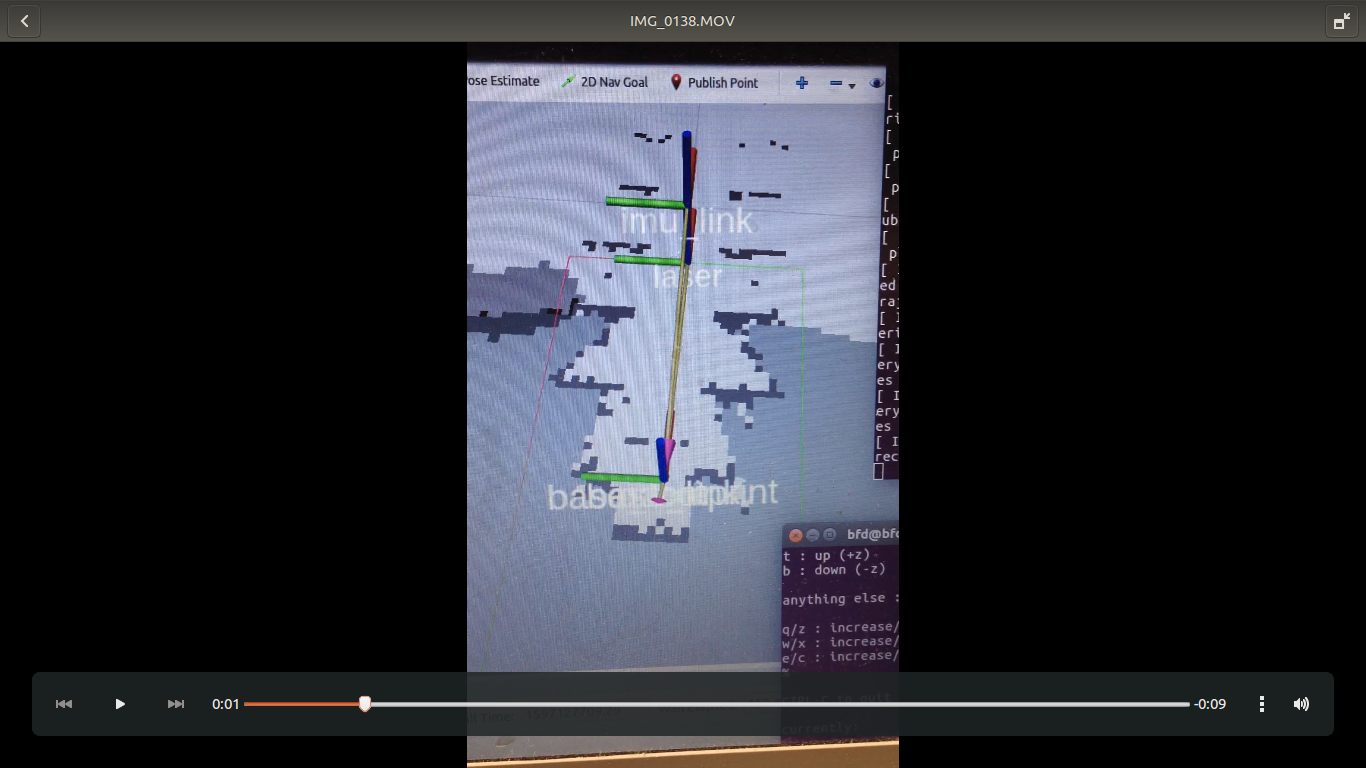
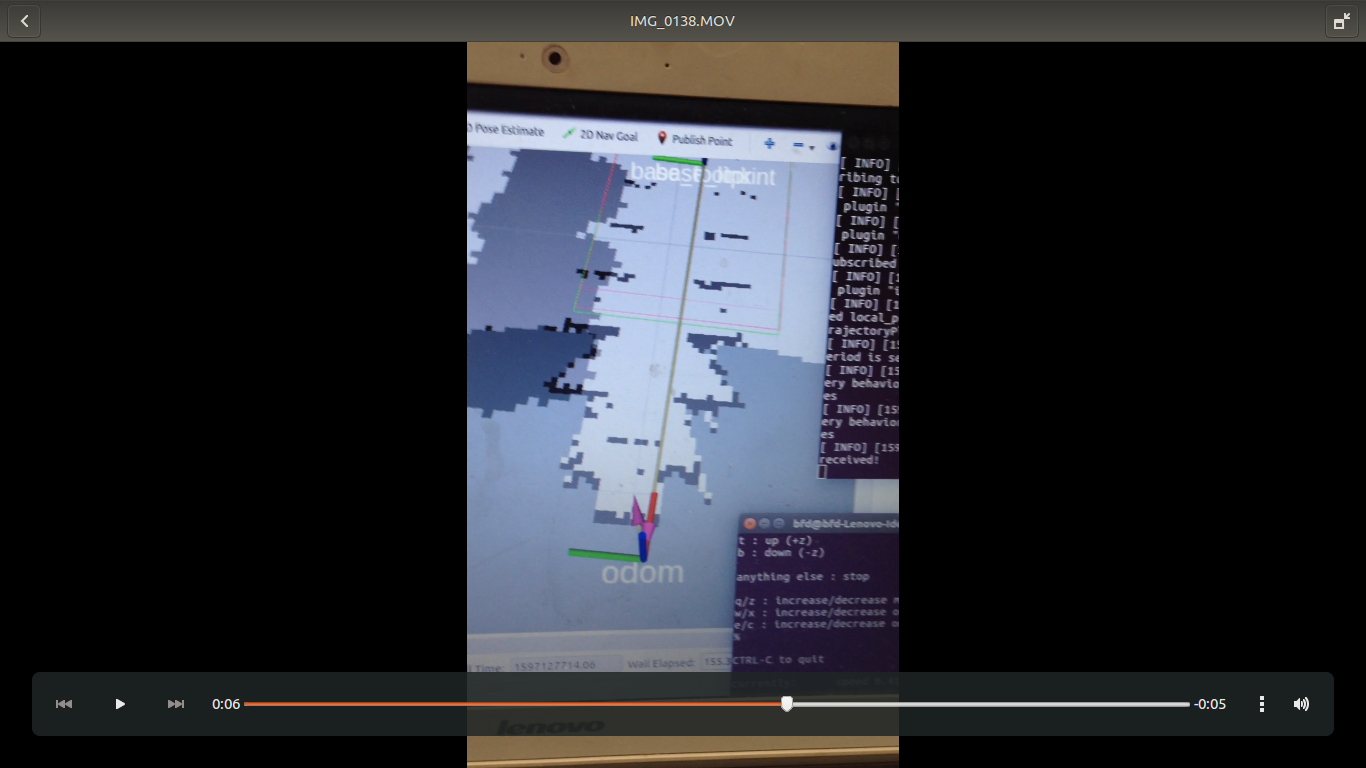
Tf or odom calculation or odom tf publishing ? First picture shows initial condition. Base_footprin base_link and odom have same position. In second picture robot moves forward so base_link and base_footpring goes forward but odom goes backward
add a comment
