
Displaying LaserScan with Odom as Fixed Frame
I have a GoPiGo3 Robot publishing the usual odom and scan topics:
/battery_voltage
/clicked_point
/cmd_vel
/initialpose
/joint_states
/led/blinker/left
/led/blinker/right
/led/eye/left
/led/eye/right
/led/wifi
/motor/dps/left
/motor/dps/right
/motor/encoder/left
/motor/encoder/right
/motor/position/left
/motor/position/right
/motor/pwm/left
/motor/pwm/right
/motor/status
/move_base_simple/goal
/odom
/rosout
/rosout_agg
/scan
/servo/position/1
/servo/position/2
/servo/pulse_width/1
/servo/pulse_width/2
/statistics
/tf
/tf_static
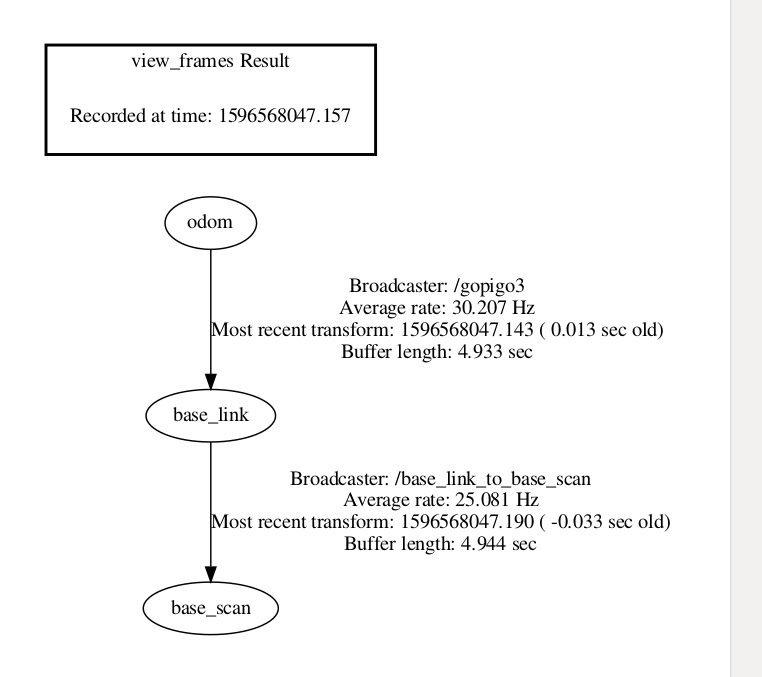
It creates TFs called odom, base_link and base_scan:
In RViz I set the Fixed Frame as odom. Once I do that the LaserScan (/scan) display in RVIz gives a mysterious error:
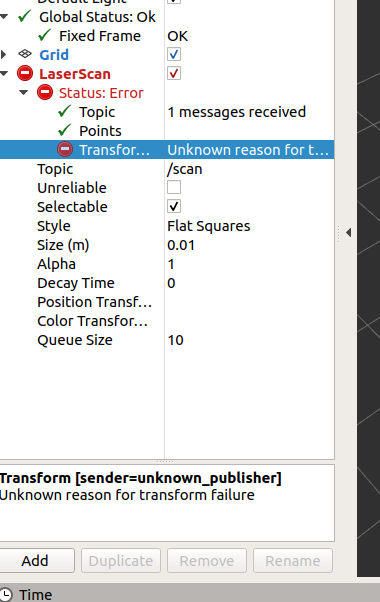
Is there something incorrect that I am doing?
add a comment
