
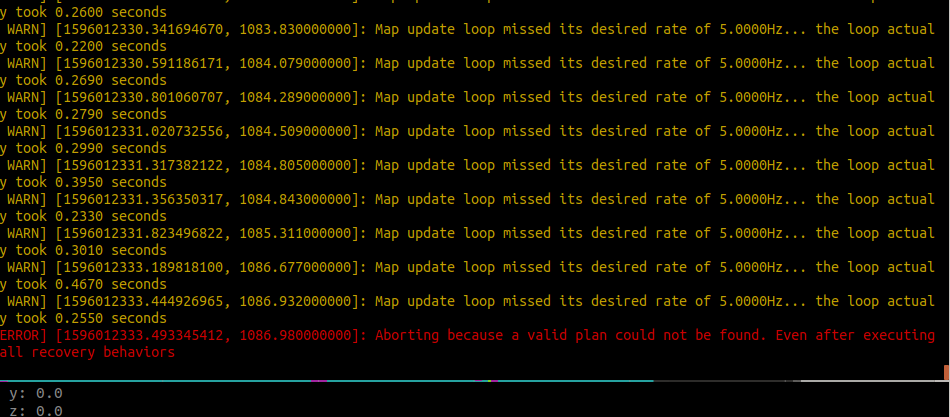
path planning not working

I am testing the ros gmapping slam and ros move_base path planner with turtlbbot3 burger robot in gazebo and rviz.
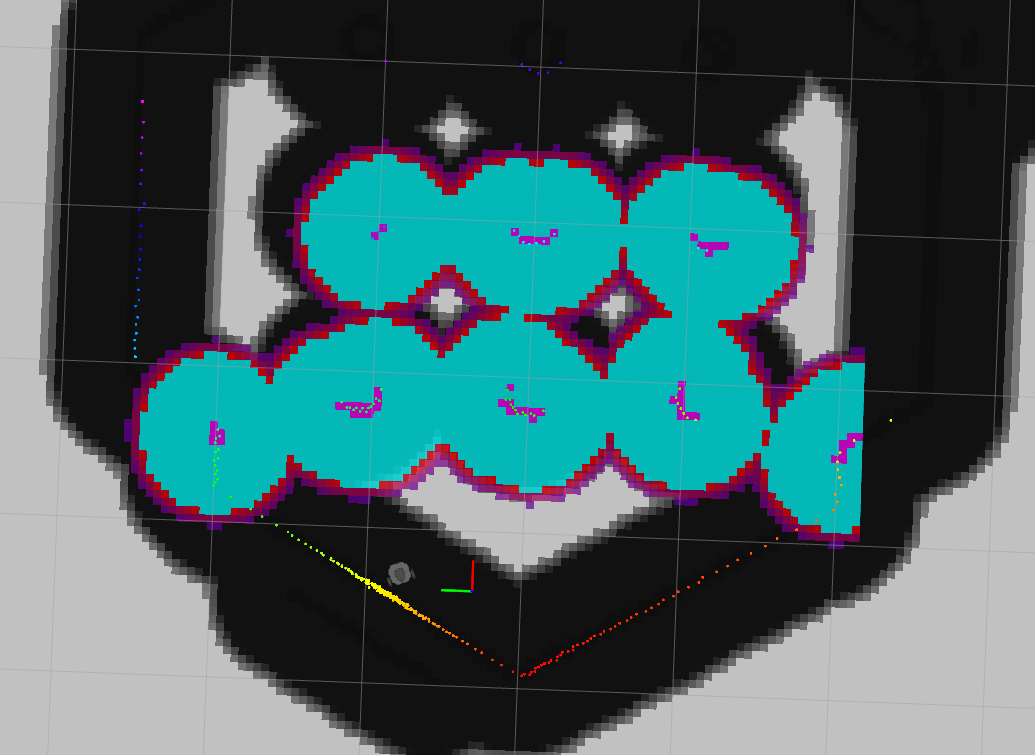 here the green with red boundaries are the local_costmap and dark one is global_costmap.
When i add the 2d navigation goal in rviz window. It sometime works when the goal is very close to the robot, else it don't moves at all, showing similar error msg in red.
here the green with red boundaries are the local_costmap and dark one is global_costmap.
When i add the 2d navigation goal in rviz window. It sometime works when the goal is very close to the robot, else it don't moves at all, showing similar error msg in red.
add a comment

