Fanuc Roboguide and ROS MoveIt (follow up)
Dear all,
I want to make a simulation of fanuc robot in Roboguide. My question concerns about specific configurations needed to send movements from within ROS/MoveIt/Rviz to the simulated robot inside Roboguide.
This post is a follow up from another question.
Briefly, I use Ubuntu 18.04.2 LTS bionic and ros-melodic.
Basically, I have ROS/Moveit respositories for fanuc. I downloaded, installed and built these repositories from this link under my catkin_ws.
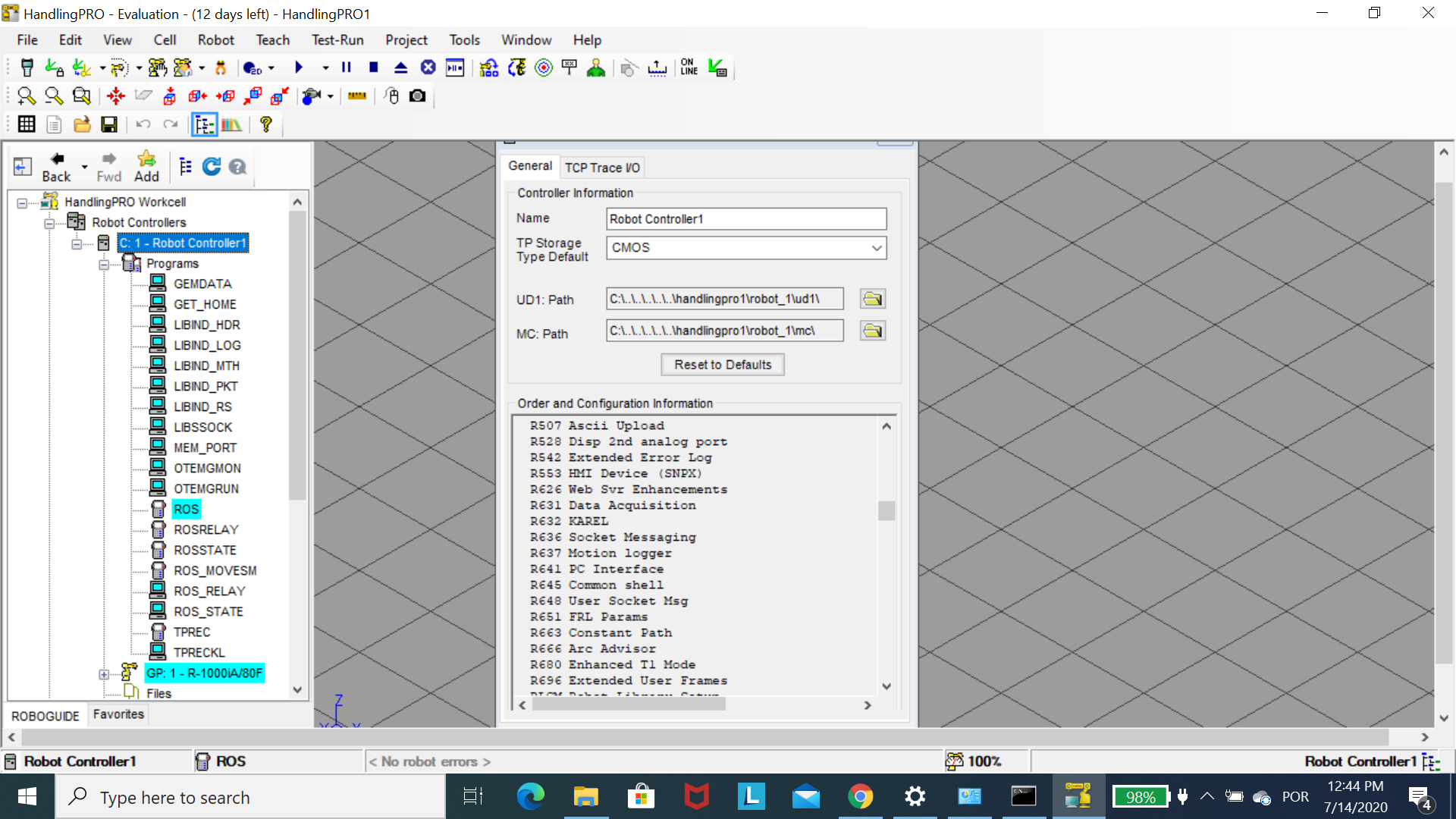
I am following this link to install and configure Roboguide on a windows PC. I have already installed Roboguide. Thanks to input from @gvdhoorn, I manually copied the folders karel and tpe on my windows PC, and within the Cell Browser, I have imported the KAREL and TPE sources into the workcell. A little confusion here; for fanuc_driver version 0.3.0 and up, just select all .kl files in the karel sub-directory. It means, that from KAREL/include sub-directory, we do not need to import any files which are in fact ending in _h.kl or _t.kl. I did not copy these _h.kl or _t.kl files, and all the files have been built successfully.
Next, on the same tutorial, in section 6 Copying the Binaries, it says, Finally, the binaries need to be transferred to the controller. Since, we are on windows PC, and working inside Roboguide. We have necessary programs (compiled binaries) already available inside Roboguide, and we are using the simulated controller. Where do we have to copy the files? Or is it referring in case if we had a real-robot? So, for our case, with the simulation, we can just proceed with the next steps.
Next, I move on the next tutorial, which are in fact further configurations. I have this question, section 2 Server Tags check Tag availability and status, open the Host Comm setup screen, which I cannot locate. Please, if you can help me clarify these steps, and give suggestions on next steps.
thanks,
Zahid