Rviz says LaserScan "transform [sender=unknown_pubisher]" but all evidence points against it
Updated with more details
I'm testing out a GoPiGo3 robot with slam. I have a strange situation that I am trying to troubleshoot. The above error is displayed in Rviz: LaserScan "transform [sender=unknown_pubisher] - Unknown Reason for transform failure". One odd symptom is that the tf tree displayed in rqt is different from the one displayed in rosrun tf view_frames.
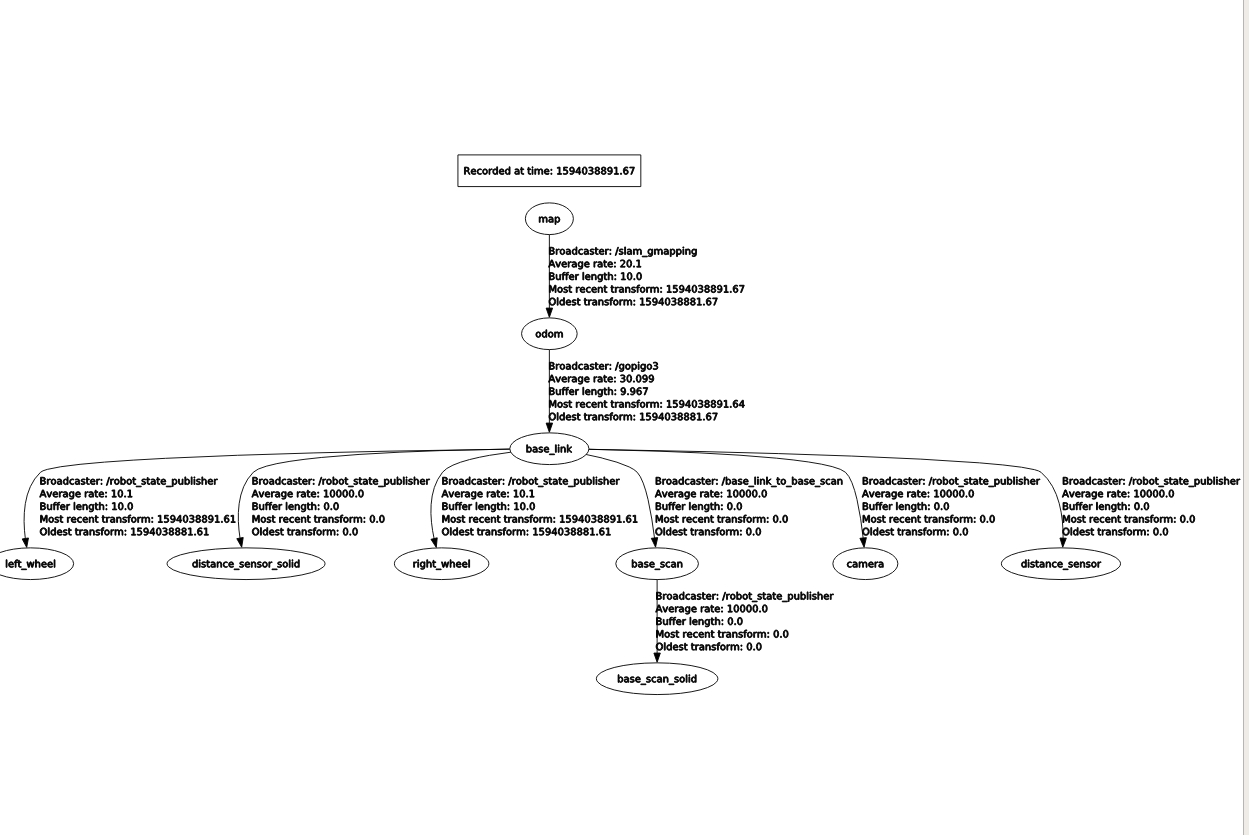

And in particular, view_frames shows a suspicious disconnected map transform. Although I've found that sometimes the same command will show a correct tree. Which diagram do I believe and what could cause a disconnected graph like that? Thanks for any help!!
I also get this when I launch the slam launch file. I think that message is coming from rviz because I think it's the only one reading the urdf. I may be wrong: "[ WARN] [1594126798.327158053]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF."
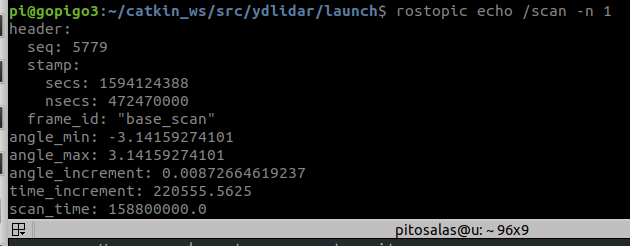
Also here's the scan topic showing that it is on the correct tf: