how to find an inverted transformation of a frame

Hi
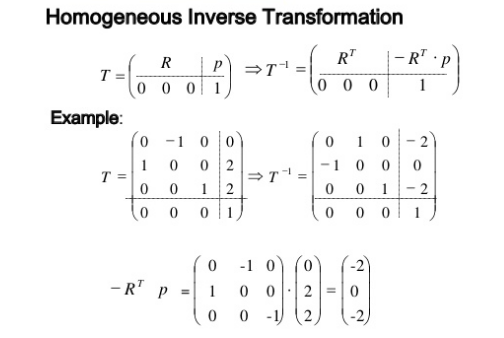
let's say I have a transformation "map->odom" in the topic /TF as the following example, how do I calculate an inverse transformation of odom -> map, mathematically speaking. What is the pose of the map frame in the odom frame?
transforms:
-
header:
seq: 0
stamp:
secs: 248
nsecs: 135000000
frame_id: "map"
child_frame_id: "odom"
transform:
translation:
x: -0.0035306278666
y: -0.793366162427
z: -4.52458409831e-05
rotation:
x: -2.09344237192e-05
y: 3.72782153808e-06
z: 0.00294061514174
w: 0.999995676156
thanks
add a comment