
How to compare 2D SLAM algorithms for Memory, CPU and GPU usage? [closed]
Hi everyone,
I'm trying to compare 2D SLAM algorithms :
- Gmapping
- hector SLAM
- karto SLAM
Cartographer
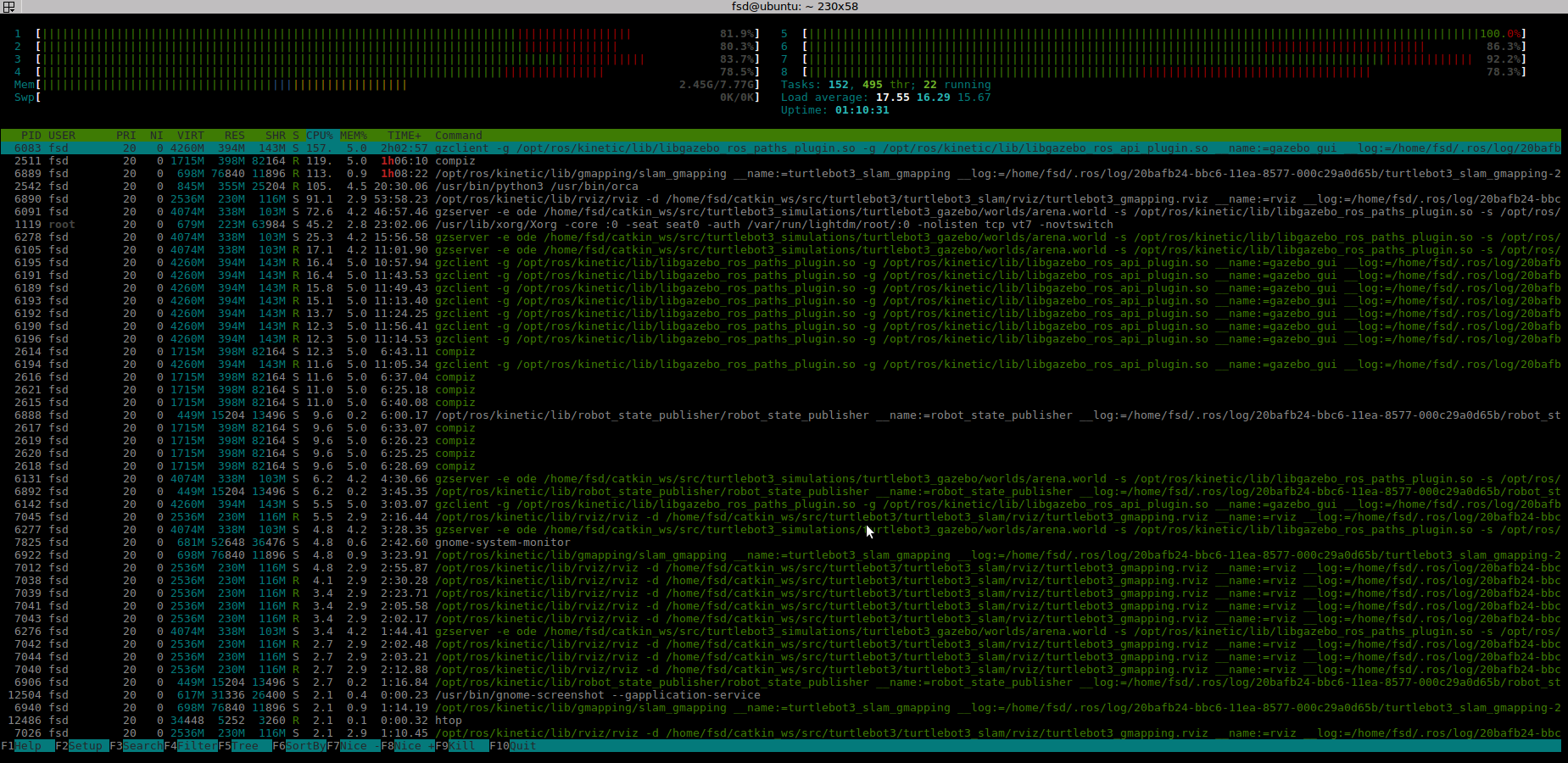
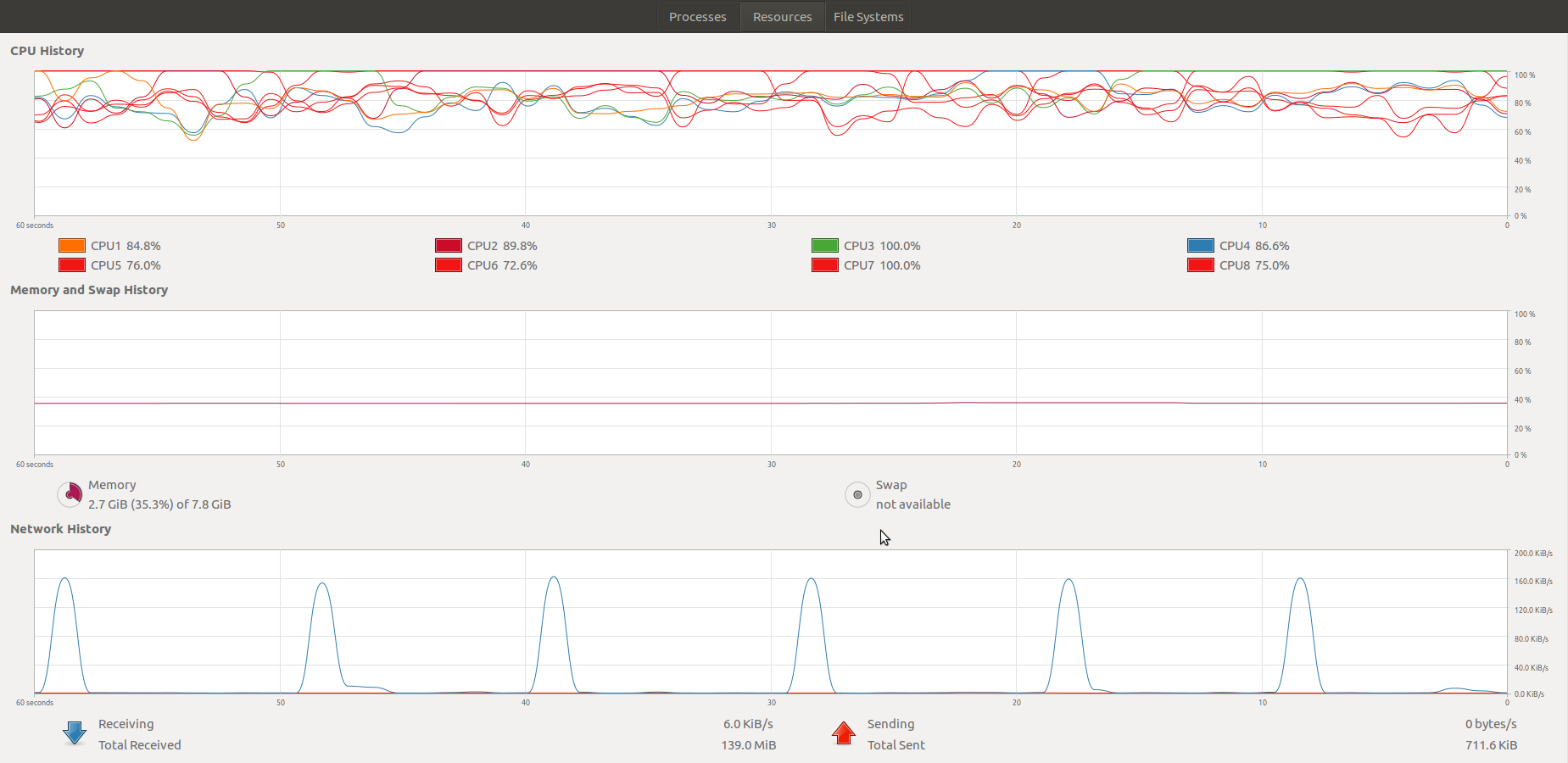
for CPU and GPU usage but I don't know how to do that for each SLAM . So I'm using top and htop to visualize the memory and CPU usage for all running tools. and it shows me that gmapping has 14% CPU usage of 8 CPU

I'm using VMware ubuntu 16.04
I appreciate your help.
Closed for the following reason
duplicate question by
dhaour9x
close date 2022-05-24 03:58:03.824784
add a comment
