
TF transform unknown_publisher
I want to connect base_link to two different nodes like below.
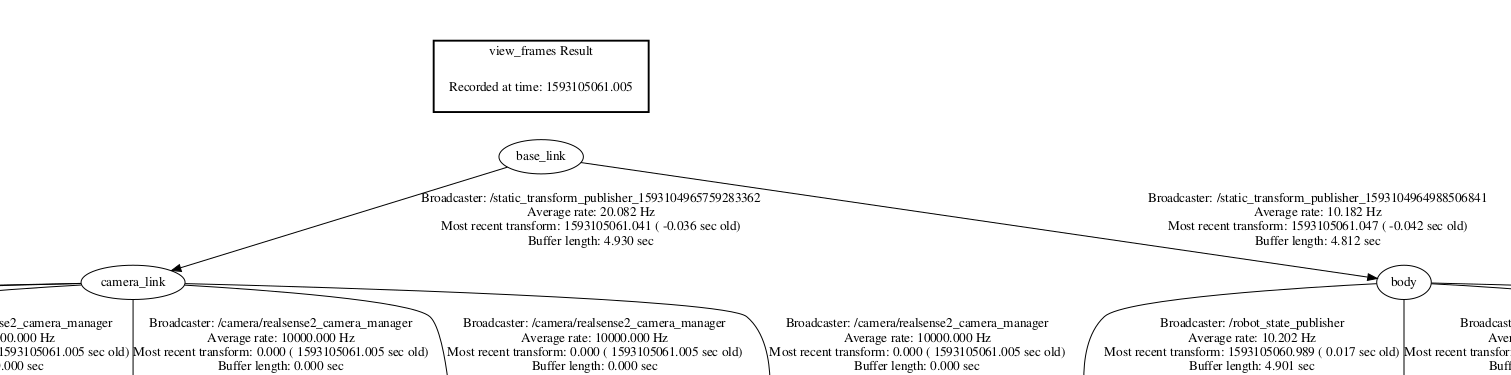
It works in bash or command window by entering rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 base_link camera_link 50
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 base_link body 100
However, if I write these two tf command in launch file
<node pkg="tf" type="static_transform_publisher" name="to_camera_link" args="0 0 0 0 0 0 0 base_link camera_link 50"/>
<node pkg="tf" type="static_transform_publisher" name="to_body" args="0 0 0 0 0 0 0 base_link body 100"/>
The error pops up "[ERROR] [1593105389.989908901]: Ignoring transform for child_frame_id "body" from authority "unknown_publisher" because of an invalid quaternion in the transform (nan nan nan nan)" which means base_link does not exist in this case. How can I fix that

