
no color in points

class ImageConverter { ros::NodeHandle nh_; image_transport::ImageTransport it_; image_transport::Subscriber image_sub_; image_transport::Publisher image_pub_; image_transport::Publisher image_pub1_; ros::Publisher pub = nh_.advertise<pointcloud> ("points2", 1); ros::Publisher marker_array_pub = nh_.advertise<visualization_msgs::markerarray>
("visualization_marker_array", 1);
ros::Publisher marker_pub;
visualization_msgs::MarkerArray marker_array, arrow_array, vally_array;
visualization_msgs::Marker marker;
public:
ImageConverter()
: it_(nh_)
{
// Subscrive to input video feed and publish output video feed
image_sub_ = it_.subscribe("/cv_camera/image_raw", 1,
&ImageConverter::imageCb, this);
image_pub_ = it_.advertise("/image_converter/output_video", 1);
image_pub1_ = it_.advertise("/image_converter1/output_video", 1);
marker_pub = nh_.advertise<visualization_msgs::Marker> ("visualization_marker",1);
marker.header.frame_id = "/base_frame";
marker.header.stamp = ros::Time();
marker.ns = "points";
marker.action = visualization_msgs::Marker::ADD;
marker.pose.orientation.w = 1;
marker.id = 1;
marker.type = visualization_msgs::Marker::POINTS;
marker.scale.x = 1.0f;
marker.scale.y = 1.0f;
marker.scale.z = 1.0f;
marker.color.a = 1.0f;
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.lifetime = ros::Duration();
}
~ImageConverter()
{
}
//Eigen::Vector3d GetPoint(Eigen::Vector3d p0,double theta,const cv::Mat img);
void SetMarkerArray(visualization_msgs::Marker marker,visualization_msgs::MarkerArray &marker_array,Eigen::Vector3d pi,uint32_t type,std::size_t marker_id,std_msgs::ColorRGBA color,Eigen::Vector3d p0={-1,-1,-1});
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
...
else if (has_free_plane_below) {
p.x = p0.x(); p.y = p0.y(); p.z = p0.z();
pc.r = 1.0f; pc.g = 0.0f; pc.b = 0.0f; pc.a = 1.0f;
marker.points.push_back(p);
marker.colors.push_back(pc);
//std::cout<<"vally2"<<std::endl;
resImg.at<cv::Vec3b>(x0,y0) = {0,0,255};
}
...
marker_pub.publish(marker);
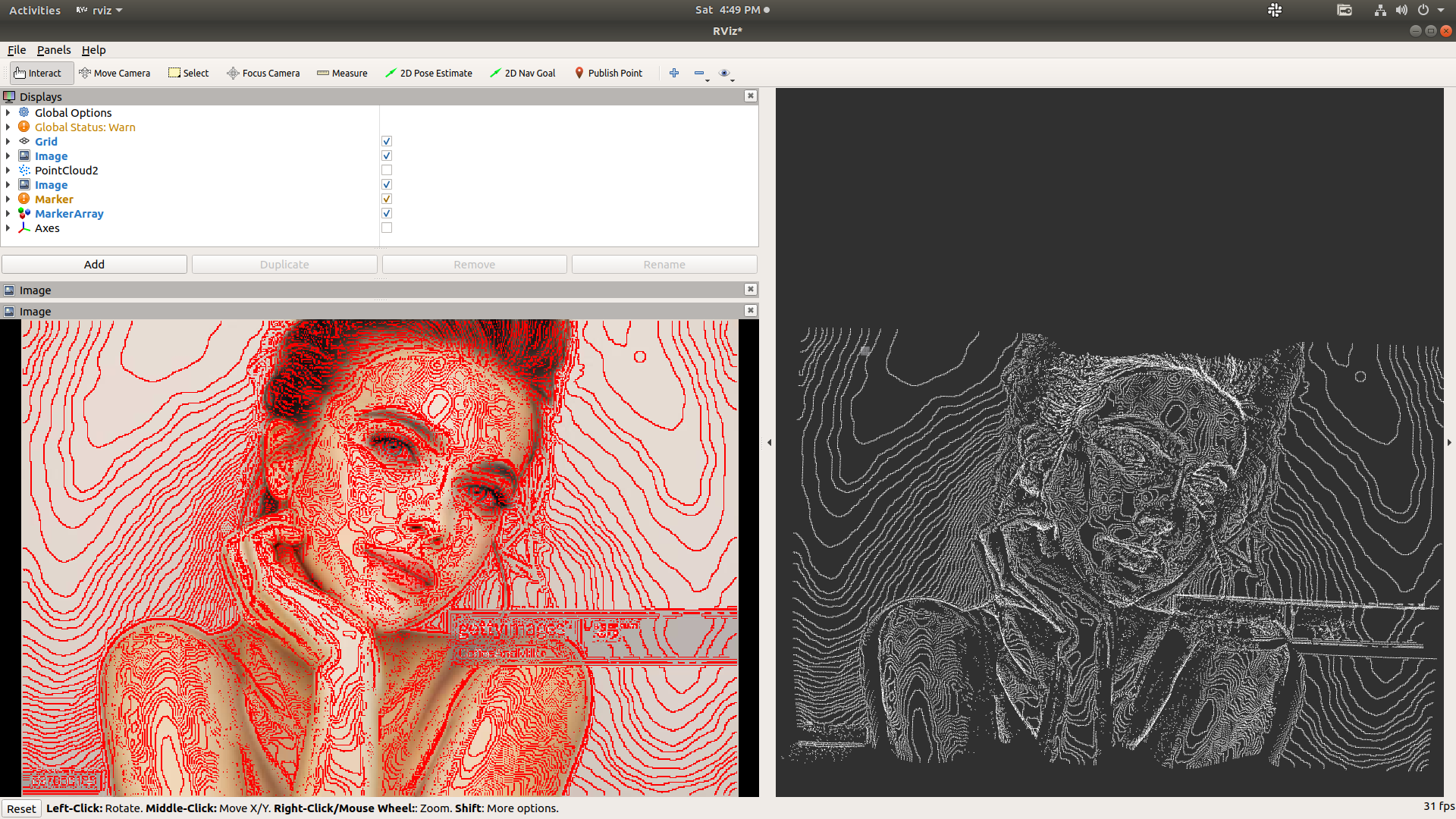
Above is the small code and screenshot of the result of my algorithm. Here i am trying to visualize different points in rviz with different colors but unfortunatly i'm not able to solve this problem till now i.e not able to give color to points.
add a comment
