
Error displaying URDF in webpage
I am following this tutorial on visualizing a URDF in a webpage. All of the commands are running fine in terminal however, when opening the webpage I am seeing this :
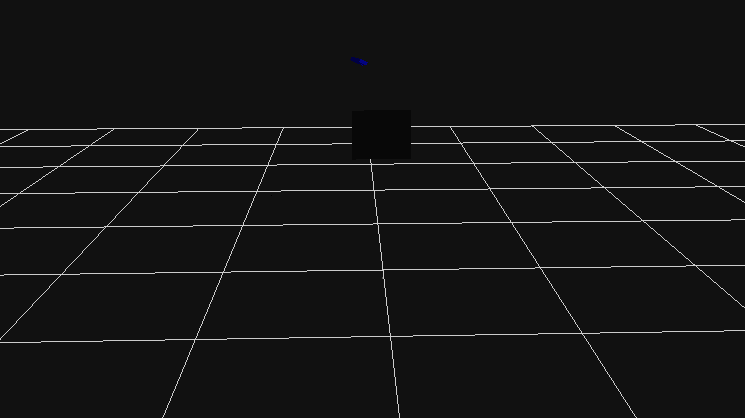
I am able to rotate and move the camera around like it is supposed to. However, the URDF model is just not loading properly.
I receive this warning when running rosrun robot_state_republisher robot_state_republisher :
The root link base_footprint has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF but I am unsure if this has anything to do with the error.
[Running ROS Melodic on Ubuntu 18.04]

Have you tried or is it just an assumption ?
Sorry, tried what exactly?
The error tells you that the root link has an inertia but it's not supported. The workaround is to add a link with nothing and connecting it to
base_footprint(i.e. a dummy link) :I haven't tried it yet because I'm not using a model / I don't know where to find the model that the tutorial is using
If you have propperly followed your tutorial then it should be in tha package pr2_description. To change the model you should clone this repo to your workspace.
I have cloned the package pr2_description, but I do not know which file specifically to add the dummy link into - there are many xacro files inside the package.
To the best of my knowledge, the warning should have nothing to do with the visualization. It is meant for those who need to use KDL libraries, especially dynamics solvers. I am pretty confident that you can safely ignore it in this application!
Thank you.. but the problem in my original question is still the same. The URDF model is not loading where it is supposed to