
Issue with getting nodes to publish/subscribe to topics between computers.
I seem to be having an issue with getting two nodes to publish/subscribe to a topic when going through a master. I have a raspberry Pi that I am trying to run teleop_twist_keyboard to publish a \cmd_vel to a topic that will be read by a PWM board. If I run all 3 nodes on the raspberry Pi while still connecting to my laptop it works, however if I try and run the teleop_twist_keyboard from my laptop it no longer works.
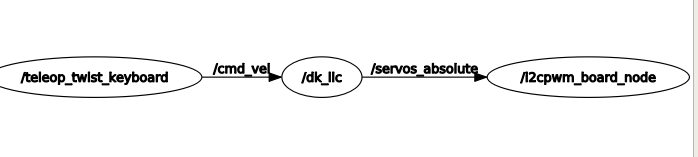
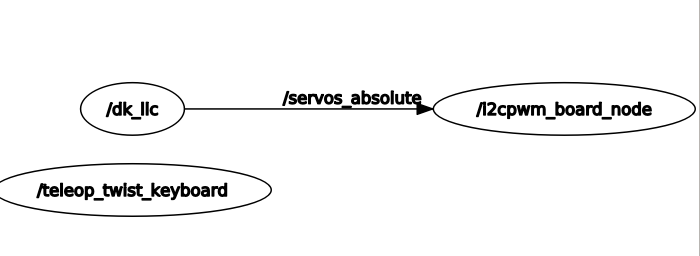
I have attached two pictures of the node layout. The first is with them running on the same Pi and the second is with the node running separately on my laptop. I'm sorry if this is something simple I'm just not sure where I'm going wrong.
Actually it seems I cannot upload pictures as I do not have enough points! Either way, the Pi version shows the two nodes connected by the topic /cmd_vel while the Laptop does not even though they are the same files. I'm pretty new to this so I'm sorry if my question is not very clear

Please attach your
rqt_graphscreenshots. I've given you sufficient karma.I have attached them, thank you!