
insert an intermediate point in a trajectory for the robot

Hello
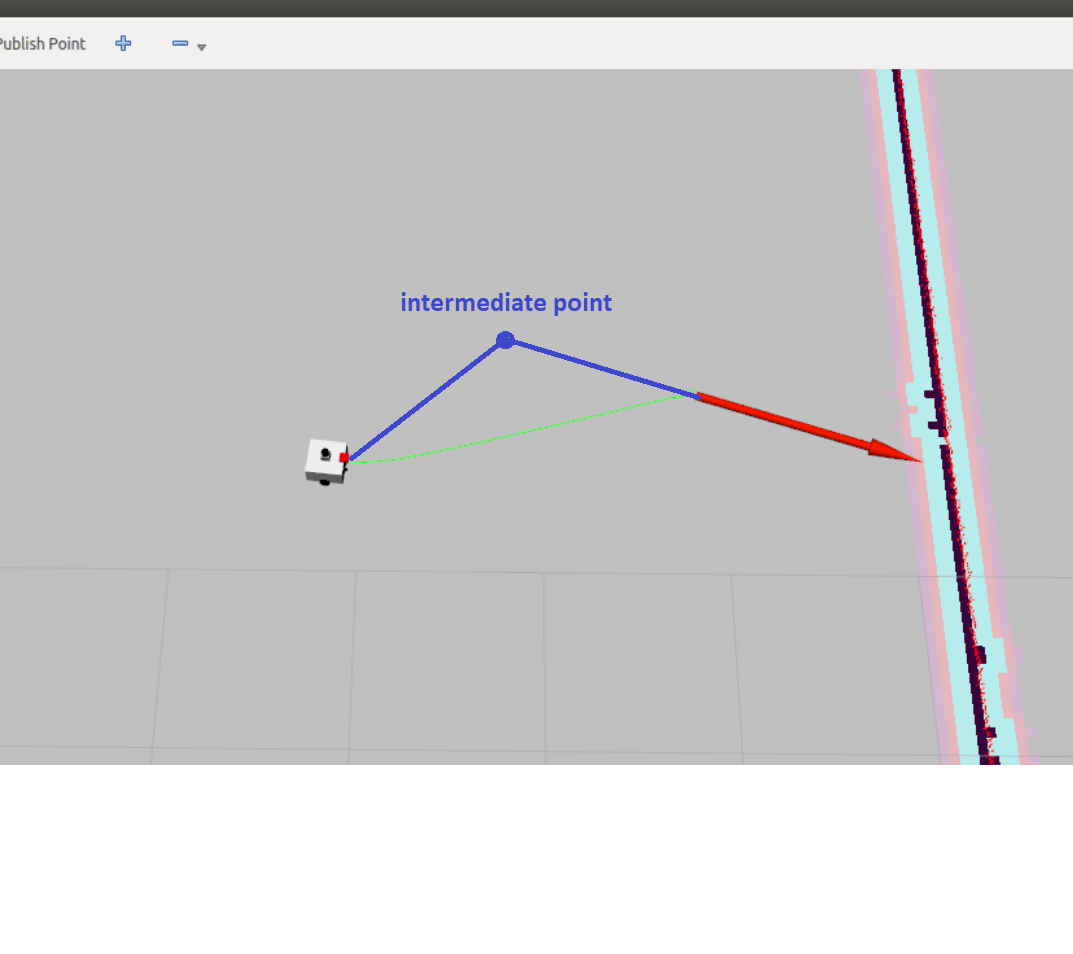
Assuming that I know the destination point that my robot must reach, a trajectory is created automatically (green color).
Is it possible to create or modify the trajectory (blue color) by forcing the robot to pass through an intermediate point before reaching its goal?
The intermediate point would cause the robot to approach the objective from the front instead of following it directly with a diagonal trajectory.
Example:
add a comment
