
rosbag plays topics with different time
I am trying to use rosbag option for testing. The problem is that when i try to play two topic which recorded same time, same computure, the topics are played with different time.
so,
one topic is coming from realsense T265 (camera/odom/sample)
another topic is coming from CNC controller -> PC -> topic (/con_odom/x)
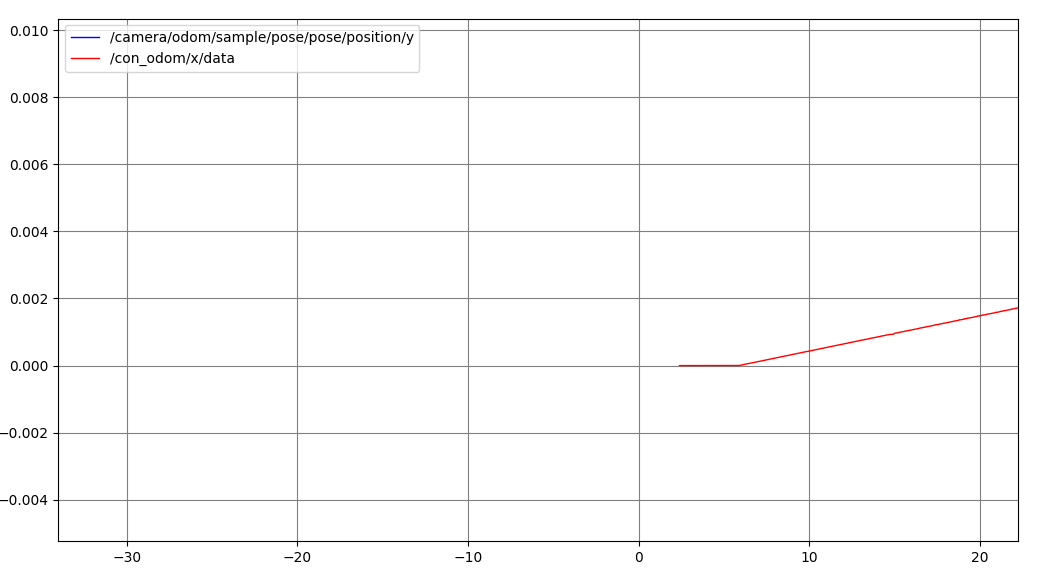
this is when i plot both of topics. you can see there is only one topic which is coming from the controller. and if i remove this topic from plotting
i get
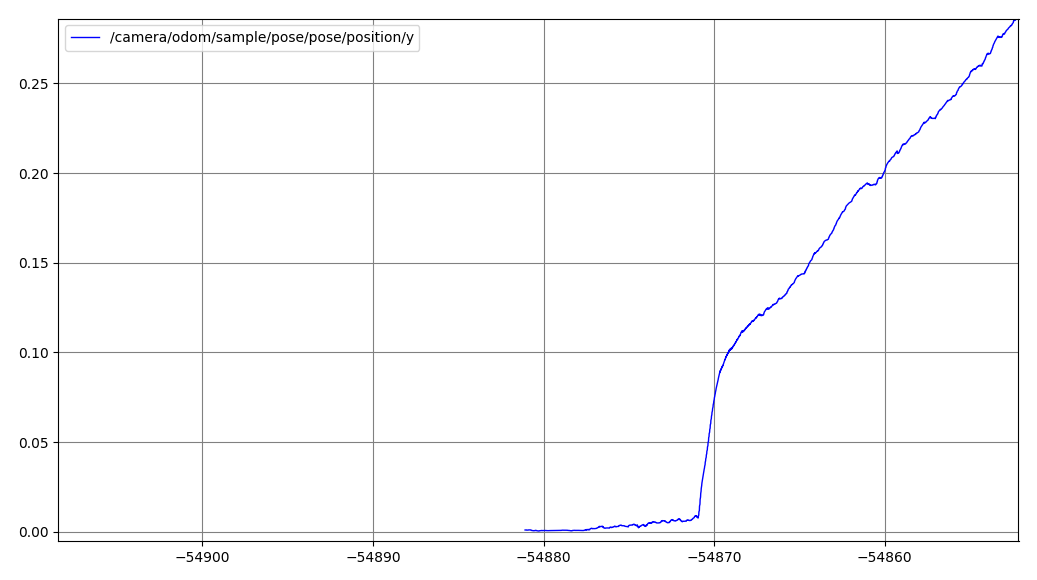
this one, which starting time is way off the 0. i have no idea why this is happening. i played both topic and record it at the same time. using comman "rosbag record -O /camera/odom/sample /con_odom/x"
maybe something wrong with the Realsense t265 launch file? (roslaunch realsense2_camera rs_camera.launch from https://github.com/IntelRealSense/rea...)
i would really appreciate for answering my quest. thx!
