
white color rviz

When i run the rviz and view the markers being published it's color is not changeing from white to any other colour. Here is the screenshot i took:
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
// PCL specific includes
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include "pcl_ros/point_cloud.h"
#include <visualization_msgs/Marker.h>
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <iostream>
#include <math.h>
#include <visualization_msgs/Marker.h>
#include "std_msgs/Float32.h"
#include "rosbag/bag.h"
#include <rosbag/view.h>
#include <vector>
#include <utility>
#include <fstream>
#include <utility>
#include <fstream>
#include <iterator>
#include <string>
#include <boost/interprocess/file_mapping.hpp>
#include <boost/interprocess/mapped_region.hpp>
static const std::string OPENCV_WINDOW = "Image window";
using namespace std;
class ImageConverter
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
ros::Publisher marker_pub = nh_.advertise<visualization_msgs::Marker> ("visualization_marker",1);
public:
ImageConverter()
: it_(nh_)
{
// Subscrive to input video feed and publish output video feed
image_sub_ = it_.subscribe("/cv_camera/image_raw", 1,
&ImageConverter::imageCb, this);
image_pub_ = it_.advertise("/image_converter/output_video", 1);
cv::namedWindow(OPENCV_WINDOW);
}
~ImageConverter()
{
cv::destroyWindow(OPENCV_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
visualization_msgs::Marker marker;
marker.header.frame_id = "/camera_link";
marker.header.stamp = ros::Time();
marker.ns = "lines";
marker.action = visualization_msgs::Marker::ADD;
marker.pose.orientation.w = 1;
marker.id = 0;
marker.type = visualization_msgs::Marker::POINTS;
marker.scale.x = 0.1;
marker.scale.y = 0.1;
marker.scale.z = 0.1;
geometry_msgs::Point P; std_msgs::ColorRGBA pc, parent;
// Draw an example circle on the video stream
if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60)
cv::circle(cv_ptr->image, cv::Point(50, 50), 10, CV_RGB(255,0,0));
cv::Mat Lab;
cv::cvtColor(cv_ptr->image,Lab,cv::COLOR_BGR2Lab);
for(int x=0;x<cv_ptr->image.cols;x++) {
for(int y=0;y<cv_ptr->image.rows;y++) {
P.x = (float)Lab.at<cv::Vec3b>(y,x)[0]/100.0;
P.y = (float)Lab.at<cv::Vec3b>(y,x)[1]/128.0;
P.z = (float)Lab.at<cv::Vec3b>(y,x)[2]/128.0;
pc.r = (float)cv_ptr->image.at<cv::Vec3b>(y,x)[0]/255.0;
pc.g = (float)cv_ptr->image.at<cv::Vec3b>(y,x)[1]/255.0;
pc.b = (float)cv_ptr->image.at<cv::Vec3b>(y,x)[2]/255.0;
pc.a = 1;
marker.points.push_back(P);
marker.colors.push_back(pc);
}
}
marker_pub.publish(marker);
// Output modified video stream
image_pub_.publish(cv_ptr->toImageMsg());
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_converter");
ImageConverter ic;
ros::spin();
return 0;
}
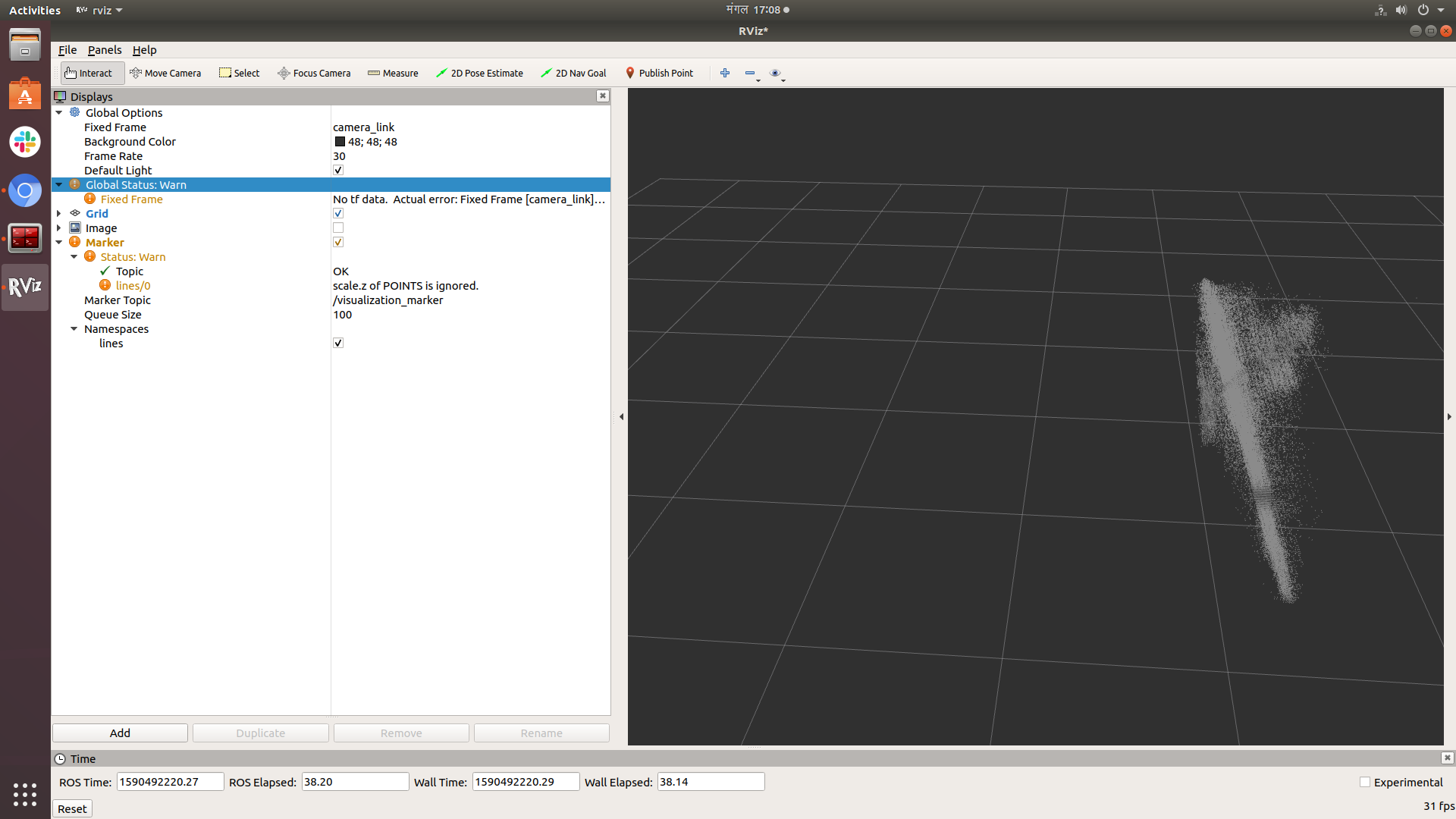

Could you post an image of the point clound/marker's settings in the RViz?
Have you tried modifying the colours directly on the rviz interface?
Ok i'v updated my question with the screen shot. their is not option to modify the colours directly in rviz interface.
Instead of using markers, could you use PointClound/PointClound2 messages? These messages have a color option.