
Imrpove scan results

Hi everybody,
I'm trying to simulate a laser scanner with an ultrasonic sensor. Due I can't afford one. I'm using the LEGO Mindstorms set programed with Java and integrated with rosjava. The ultrasonic sensor is obviously less accurate and slower than a laser sensor. But what I'm trying to demonstrate is that with this sensor it is possible to use in a SLAM application and mapping. The thing is that when the robot is surrounded by walls, the readings (red dots) in Rviz are curved, when they were supposed to be flatted. I've been playing with the gmapping parameters without any success.
Is there any readings filter or an specific programming to improve the sensor accuracy. This is what I get running rviz and gmapping. The sensor is only capable to do up to 60 reading each 360 degrees.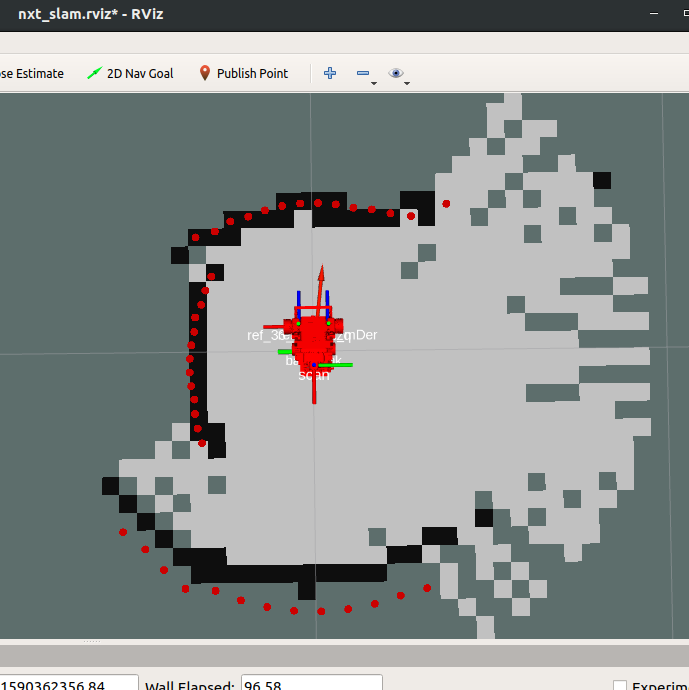

We cannot see your screenshot.
Please do not link to 3rd party hosting providers, as there are often times problems with retention. If/when your external image goes away/off-line, your question loses quite a bit of its value.
I've given you sufficient karma to attach the image directly to your question. Please do that by editing your current question, using the
editbutton/link.