
Gmapping SLAM does not work on a real Turtlebot3 waffle (no map received)

Hello, I hope you can help me. I have a real turtlebot3 waffle with an LSD sensor. I am trying to map my office but its not working. hrer are the lauch files of gmapping and turtlebot3_slam:
- I have TurtleBot3 Waffle
- ROS Kinetic Kame is working with TurtleBot3
- Raspberry Pi 3(Single Board Computer) is working on TurtleBot3
- Ubuntu MATE 16.04 installed in SBC
- Ubuntu 16.04 LTS (Xenial Xerus) installed in Remote PC
I have tried to execute gmapping Slam with the following commands:
-roslaunch turtlebot3_bringup turtlebot3_robot.launch
roslaunch turtlebot3_slam turtlebo3_slam slam_methods:=gmapping
this is Issue:
... logging to /home/fsd/.ros/log/c4c4f2ce-99e3-11ea-8085-000c29a0d65b/roslaunch-ubuntu-4535.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:39949/
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 50.0
* /robot_state_publisher/tf_prefix:
* /rosdistro: kinetic
* /rosversion: 1.12.14
* /turtlebot3_slam_gmapping/angularUpdate: 0.2
* /turtlebot3_slam_gmapping/astep: 0.05
* /turtlebot3_slam_gmapping/base_frame: base_footprint
* /turtlebot3_slam_gmapping/delta: 0.05
* /turtlebot3_slam_gmapping/iterations: 5
* /turtlebot3_slam_gmapping/kernelSize: 1
* /turtlebot3_slam_gmapping/lasamplerange: 0.005
* /turtlebot3_slam_gmapping/lasamplestep: 0.005
* /turtlebot3_slam_gmapping/linearUpdate: 1.0
* /turtlebot3_slam_gmapping/llsamplerange: 0.01
* /turtlebot3_slam_gmapping/llsamplestep: 0.01
* /turtlebot3_slam_gmapping/lsigma: 0.075
* /turtlebot3_slam_gmapping/lskip: 0
* /turtlebot3_slam_gmapping/lstep: 0.05
* /turtlebot3_slam_gmapping/map_frame: map
* /turtlebot3_slam_gmapping/map_update_interval: 2.0
* /turtlebot3_slam_gmapping/maxUrange: 3.0
* /turtlebot3_slam_gmapping/minimumScore: 50
* /turtlebot3_slam_gmapping/odom_frame: odom
* /turtlebot3_slam_gmapping/ogain: 3.0
* /turtlebot3_slam_gmapping/particles: 100
* /turtlebot3_slam_gmapping/pub_map_odom_transform: True
* /turtlebot3_slam_gmapping/resampleThreshold: 0.5
* /turtlebot3_slam_gmapping/sigma: 0.05
* /turtlebot3_slam_gmapping/srr: 0.1
* /turtlebot3_slam_gmapping/srt: 0.2
* /turtlebot3_slam_gmapping/str: 0.1
* /turtlebot3_slam_gmapping/stt: 0.2
* /turtlebot3_slam_gmapping/temporalUpdate: 0.5
* /turtlebot3_slam_gmapping/xmax: 100.0
* /turtlebot3_slam_gmapping/xmin: -100.0
* /turtlebot3_slam_gmapping/ymax: 100.0
* /turtlebot3_slam_gmapping/ymin: -100.0
NODES
/
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
turtlebot3_slam_gmapping (gmapping/slam_gmapping)
ROS_MASTER_URI=http://localhost:11311
process[robot_state_publisher-1]: started with pid [4564]
process[turtlebot3_slam_gmapping-2]: started with pid [4565]
process[rviz-3]: started with pid [4566]
[ WARN] [1543086745.282958810]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
turtlebot3_slam.launch
<launch> <!-- Arguments -->
<arg name="model" default="waffle" doc="waffle"/>
> <arg name="slam_methods" default="gmapping" doc="slam type [gmapping,cartographer, hector >karto,frontier_exploration]"/>
> <arg name="configuration_basename" default="turtlebot3_lds_2d.lua"/>
> <arg name="open_rviz" default="true"/>
>
> <!-- TurtleBot3 --> <include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
> <arg name="model" value="$(arg model)" /> </include>
>
> <!-- SLAM: Gmapping, Cartographer,
> Hector, Karto, Frontier_exploration,RTAB-Map -->
> <include file="$(find turtlebot3_slam)/launch/turtlebot3_$(arg slam_methods).launch">
> <arg name="model" value="$(arg model)"/>
> <arg name="configuration_basename" value="$(arg configuration_basename)"/>
> </include>
>
> <!-- rviz --> <group if="$(arg open_rviz)">
> <node pkg="rviz" type="rviz" name="rviz" required="true"
> args="-d $(find turtlebot3_slam)/rviz/turtlebot3_$(arg slam_methods).rviz"/> </group>
> </launch>
turtlebot3_gmapping.launch
> <launch>
> <!-- Arguments -->
> <arg name="model" default="waffle" doc="waffle"/>
> <arg ...
Please add the text from the error and remove the screen shot of it. It's always preferred to paste the text in and in this case I cannot read what the screenshot says.
Thank you. I have updated my question
After running bringup, check if the topics are being published or not using
rostopic echo <topicName>I have tested rostopic echo /scan and I got this:
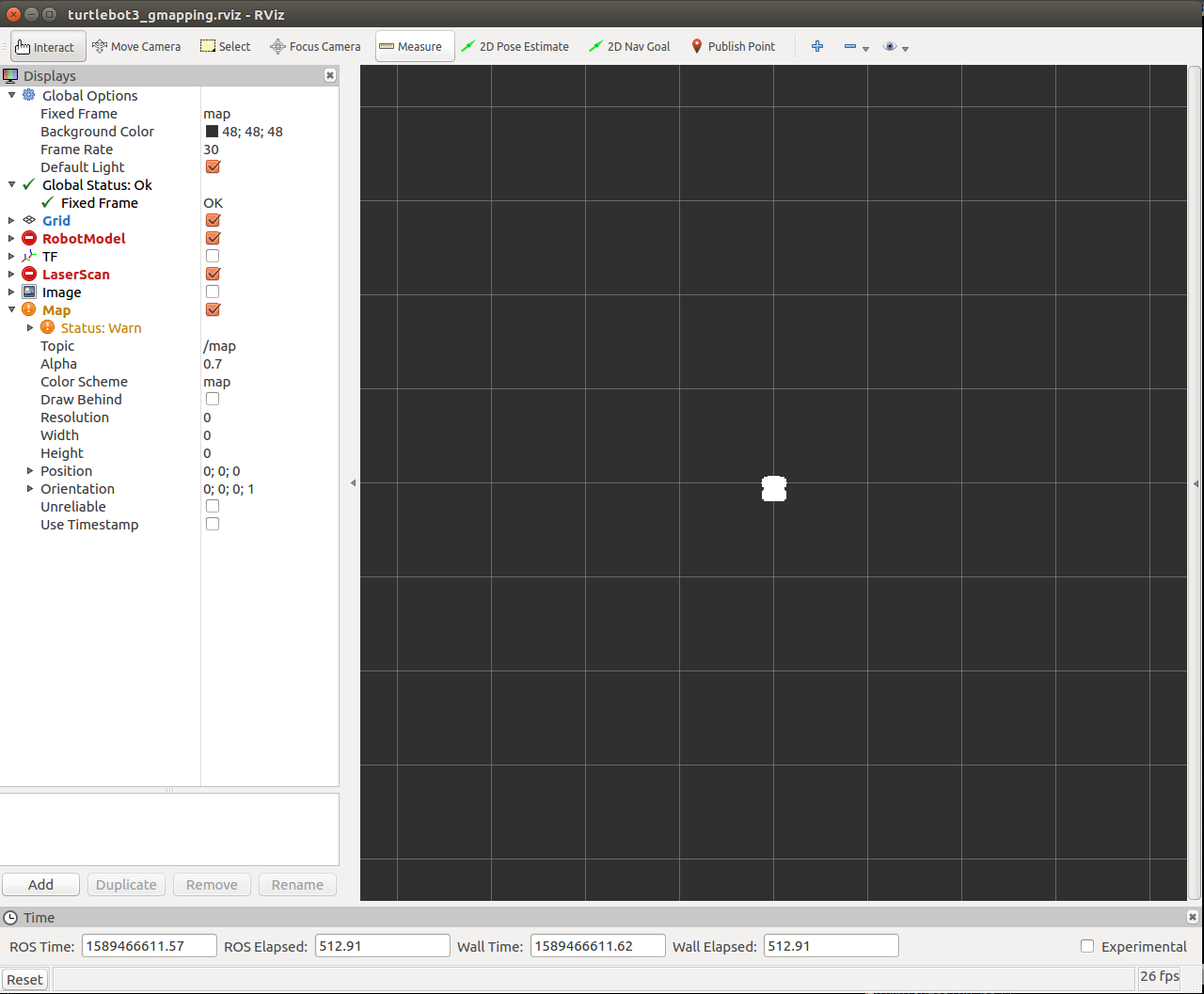
Expand LaserScan in
rvizand set the topic to/scan, looks like the values are being published correctly so they should be displayed inrvizwithout problem. Now to get the slam working I think the scan data must be published on/laser/scantopic instead of the/scantopic, please check withrosnode infowhat topic the gmapping node is subscribed to.