
How do I cartesin plan along the axis of the interactive marker?
wpose = group.get_current_pose().pose
wpose.position.z -= scale * 0.1 # First move up (z)
wpose.position.x += scale * 0.1 # and sideways (y)
waypoints.append(copy.deepcopy(wpose))
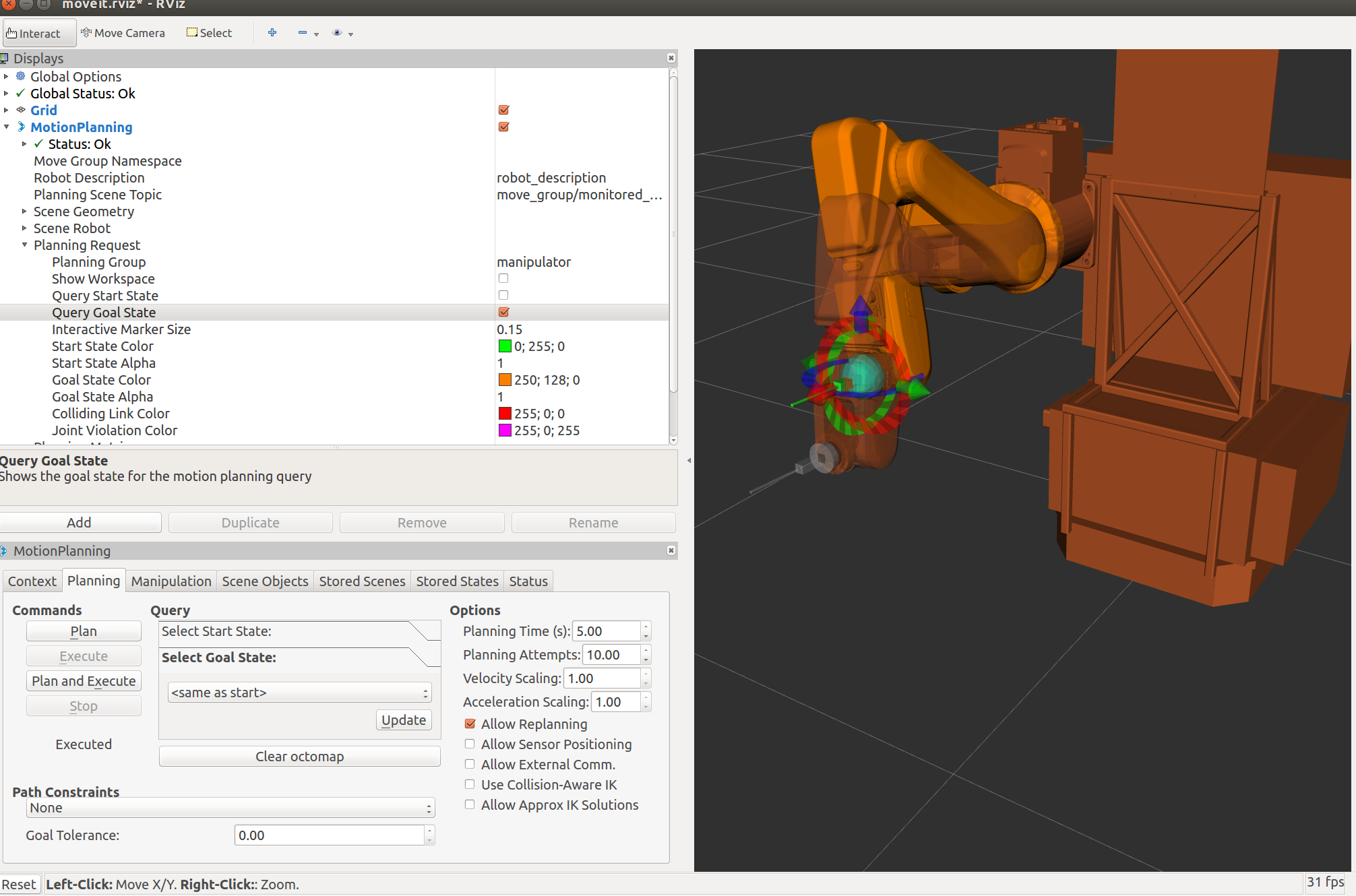
the code above (from the move_group_python_interface.py script) I believe plans on a Cartesian plane defined by the origin xyz axis in moveit, but doesn't plan in the direction of the arrows of the interactive marker. Is there another way to plan and move specifically in the directions of the arrows of the interactive marker, specifically the red arrow of the marker shown in the image?
add a comment
