
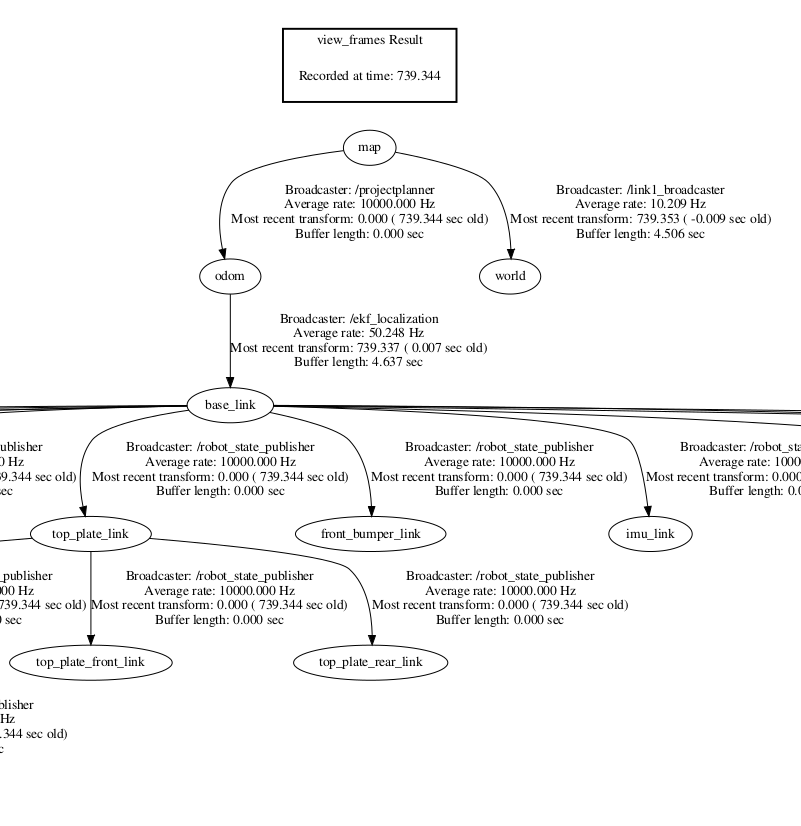
How do i use tf2 to get the transformation between husky's base_link and odom
Hello,
I have been getting errors every time i try to use tf_listener
listener.lookupTransform("base_link", "odom",ros::Time(0), transform);
robot_position.x=transform.getOrigin().x();
robot_position.y=transform.getOrigin().y();
robot_position.z=transform.getOrigin().z();
tf::Quaternion q = transform.getRotation();
this->robot_orientation= tf::getYaw(q);
The error i get is : Terminate called after throwing an instance of 'tf2::LookupException'
what(): "base_link" passed to lookupTransform argument target_frame does not exist.
add a comment
