
Clearing the obstacles form local costmap
Hello,
I want to ask, is it possible to specify somewhere in the move_base parameter how often clear the local costmap. I want to do that because I face the problem when the local costmap add a dynamic obstacles buy after the are disappeared the costmap do not clear the space too long.
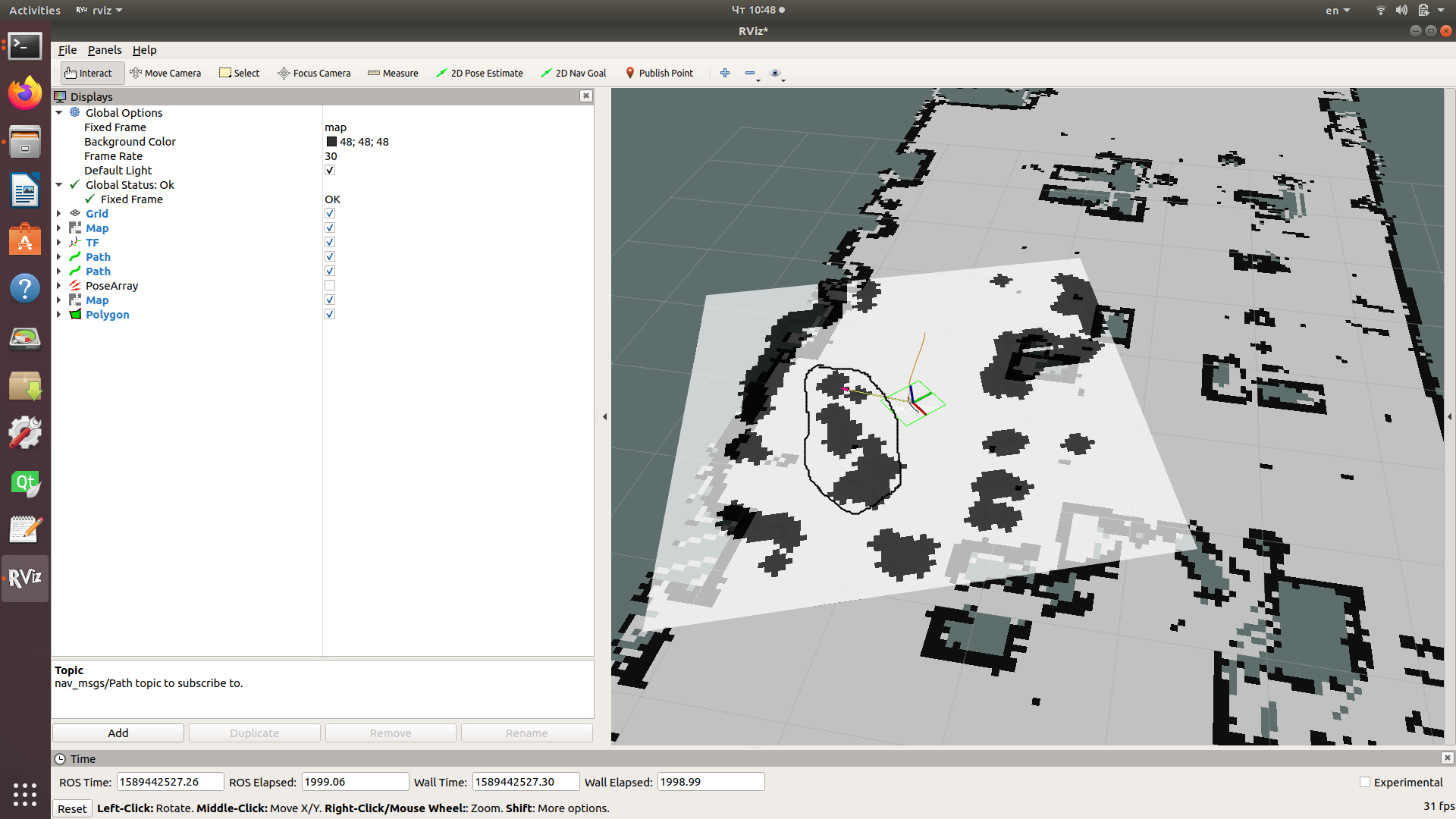
On the image below I have marked the obstacles which have already gone but they are still persist on the local costmap.
EDIT 1
local costmap parameters:
local_costmap: global_frame: odom robot_base_frame: base_footprint update_frequency: 5.0 publish_frequency: 1.0 static_map: false rolling_window: true width: 4.0 height: 4.0 resolution: 0.05
common costmap:
obstacle_range: 2.5 raytrace_range: 3.0 footprint: [[-0.2, -0.2], [-0.2, 0.2], [0.2, 0.2], [0.2, -0.2]] inflation_radius: 0.1 transform_tolerance: 1.0 observation_sources: laser_scan_sensor laser_scan_sensor: sensor_frame: laser_frame data_type: LaserScan topic: filtered_scan clearing: true marking: true min_obstacle_height: 0.1 max_obstacle_height: 0.4

