
Using navigation_stack with a fixed map and no amcl
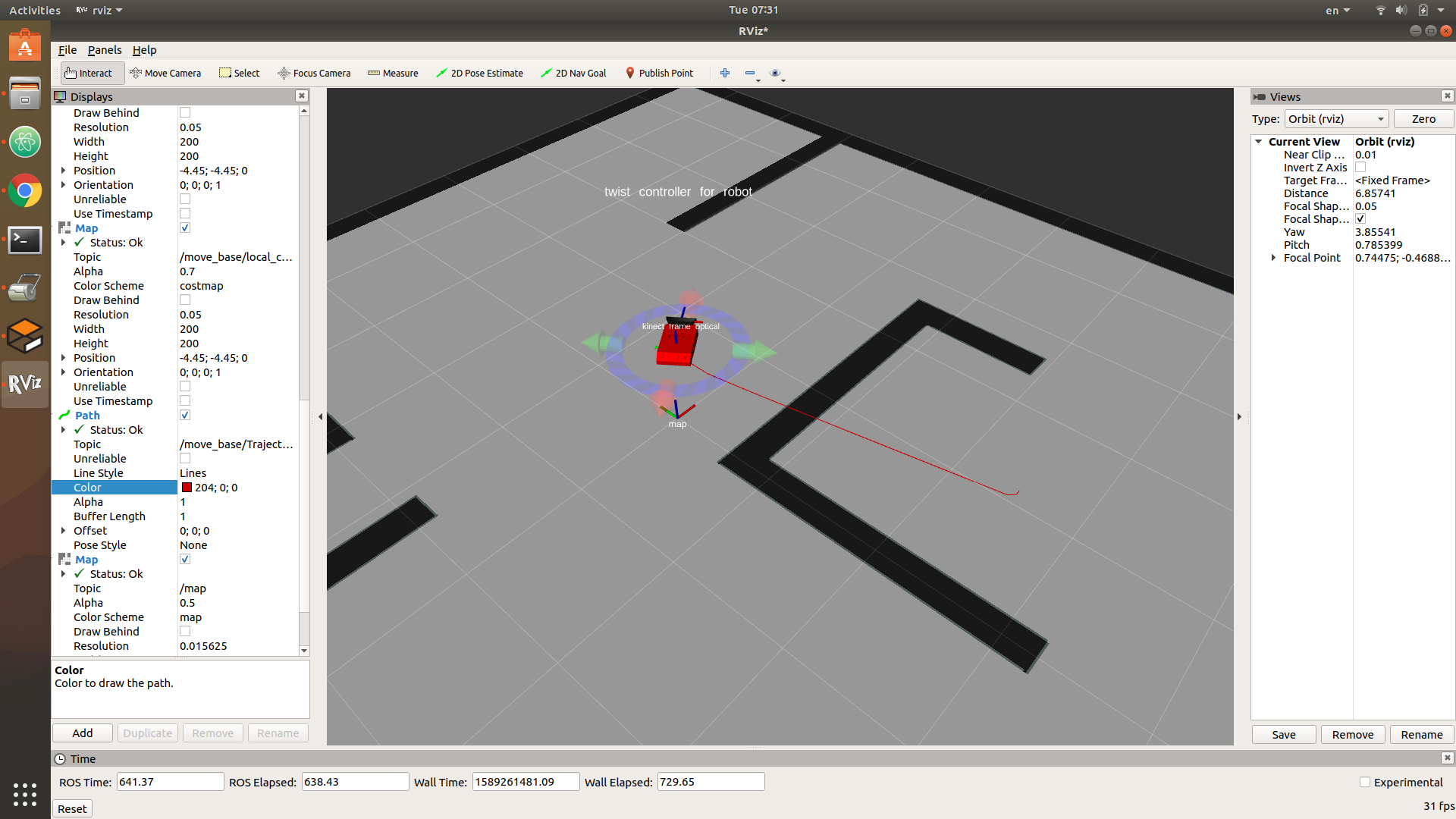
Hello, I have robot that uses the ekf node in the robot_localization package and a static map that I can load onto the map_server and I used a static tf publisher to publish frame info from odom to map. I would be able to provide the robot with its initial position (assuming the robot will always start from a fixed point on the map), so I don't need amcl. The problem is that when I send a goal pose to the robot, the path created will penetrate the obstacle areas in that map as shown the screenshot.
Does anybody have any idea how to use a static map with ekf only (no amcl)?
Thanks
add a comment
