
Is it okay to work with robotic arm and 3d point cloud data of simulated/real environment side by side in RViz?
Hey. I am still working on my first robotic arm using ROS. I have a question that I want to ask for quite sometime now. In order to do motion planning using MoveIt!, I have to add my robotic arm(i.e. load robot description format or urdf) inside rviz so that I can interact with it via markers. But, along with that suppose I want to visualize pointcloud data of my simulated/real environment. My question is:
Is it okay to interact with my robotic arm and visualize pointcloud data of my environment(how everything is working once I plan and execute after moving the marker to a desired position) at the same time?
Or, Is there any better way to do so?
What I meant is clearly shown is below screenshot:
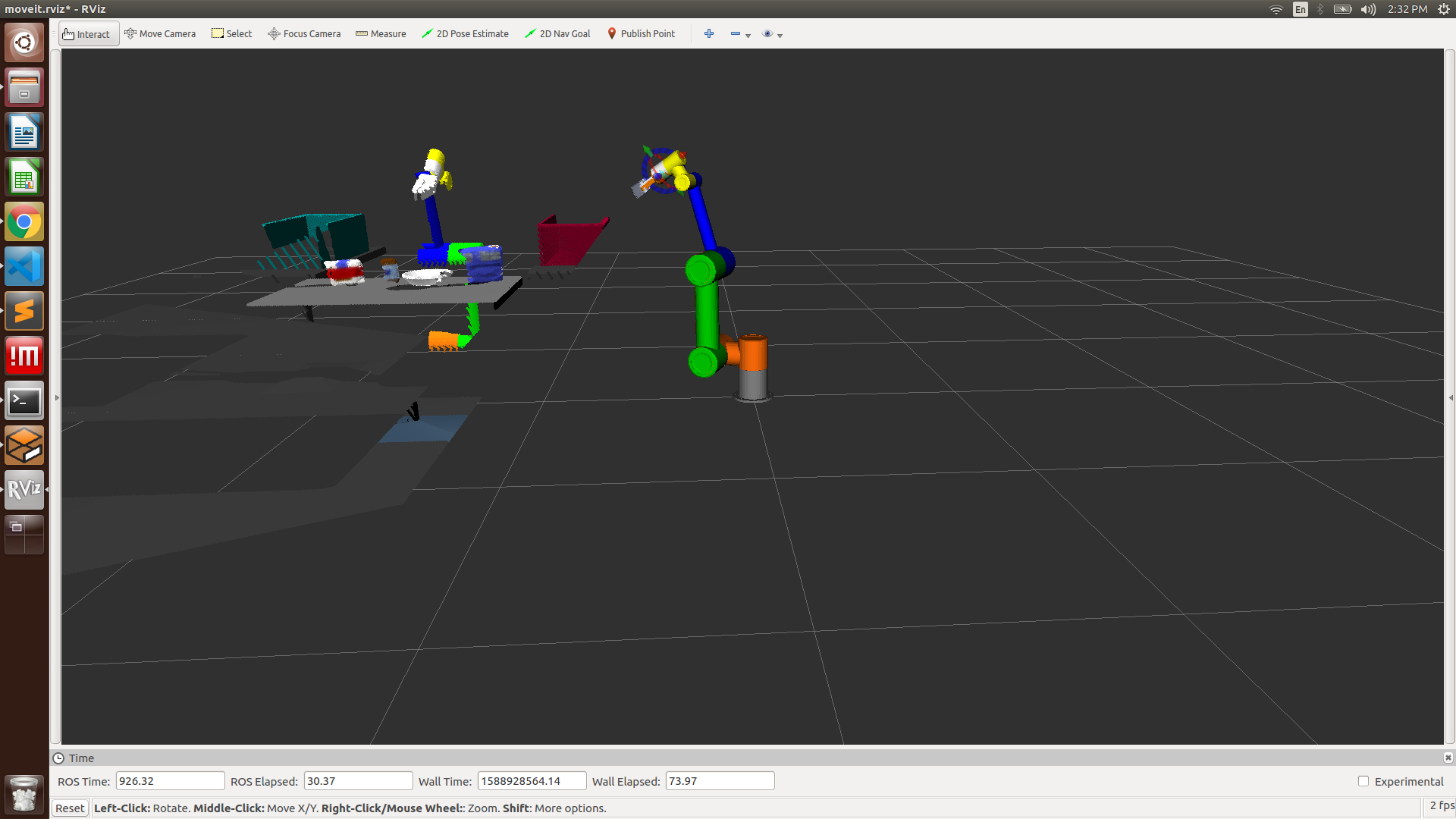
My robotic arm and pointcloud data, both can be seen in the rviz screen. I would really appreciate someone's advice/guidance on this. Thanks in advance!!
