
Transform [sender=unknown_publisher] Unknown reason for transform failure
Hello, I have issue with my lidar. It doesn't show the data when the fixed frame is anything except its own laser_frame.
I means, when I switch fixed frame to /odom or /base_footprint I do not see any data in rviz anymore and starting receive that error message :Transform [sender=unknown_publisher] Unknown reason for transform failure.
I am using YDLIDAR X4
could someone help me? Thank you
EDITED 1:
the photo of tf tree:
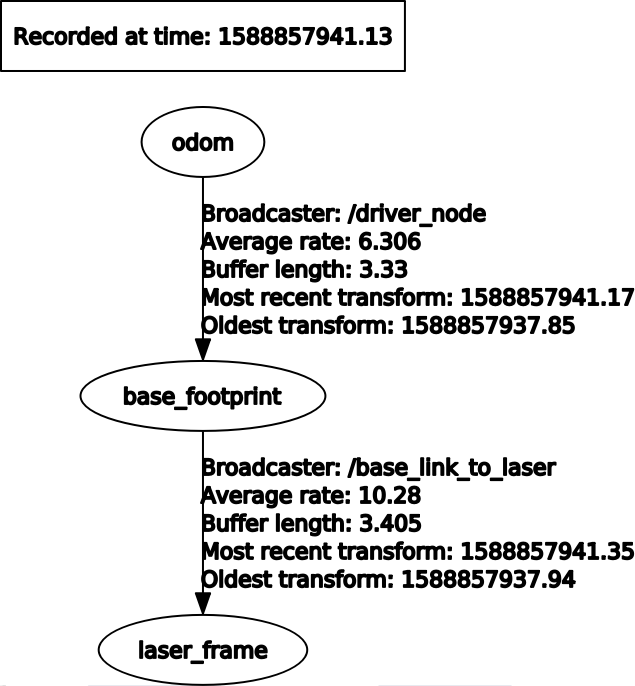

What does rosrun tf view_frames show for a tf tree?? Likely you dont load the urdf of your robot, or dont publish a map and odom etc. Do you only launch X4.launch? Fixed frame in rviz usually is the map frame. For your lidar you need a laser_frame in your urdf or a static transform publisher wich transforms direct or indirect from base_link/base_footprint to laser_frame. The standard X4.launch file has a static transform from base_footprint to laser_frame (the last few lines). In the launchfile as well there is the line "" . Visualization only works if there is a transform for the frame_id´s frame. X4.launch alone only gives you laser_frame no other transforms are published no odom no base_footprint.
@Dragonslayer I have added
I have static transform publisher from base_footprint to laser_frame.
Odom publishes at low frequenzy 6hz. Might be an issue. If you just launch X4.lauch without the driver_node and set fixed_frame base_footprint the same thing happens?
If you visualize tf in rviz what does it show? Errors as well?