
How do I relocate the interactive marker to the tip of the needle?
Hi, i want to move the planner marker to the tip of the needle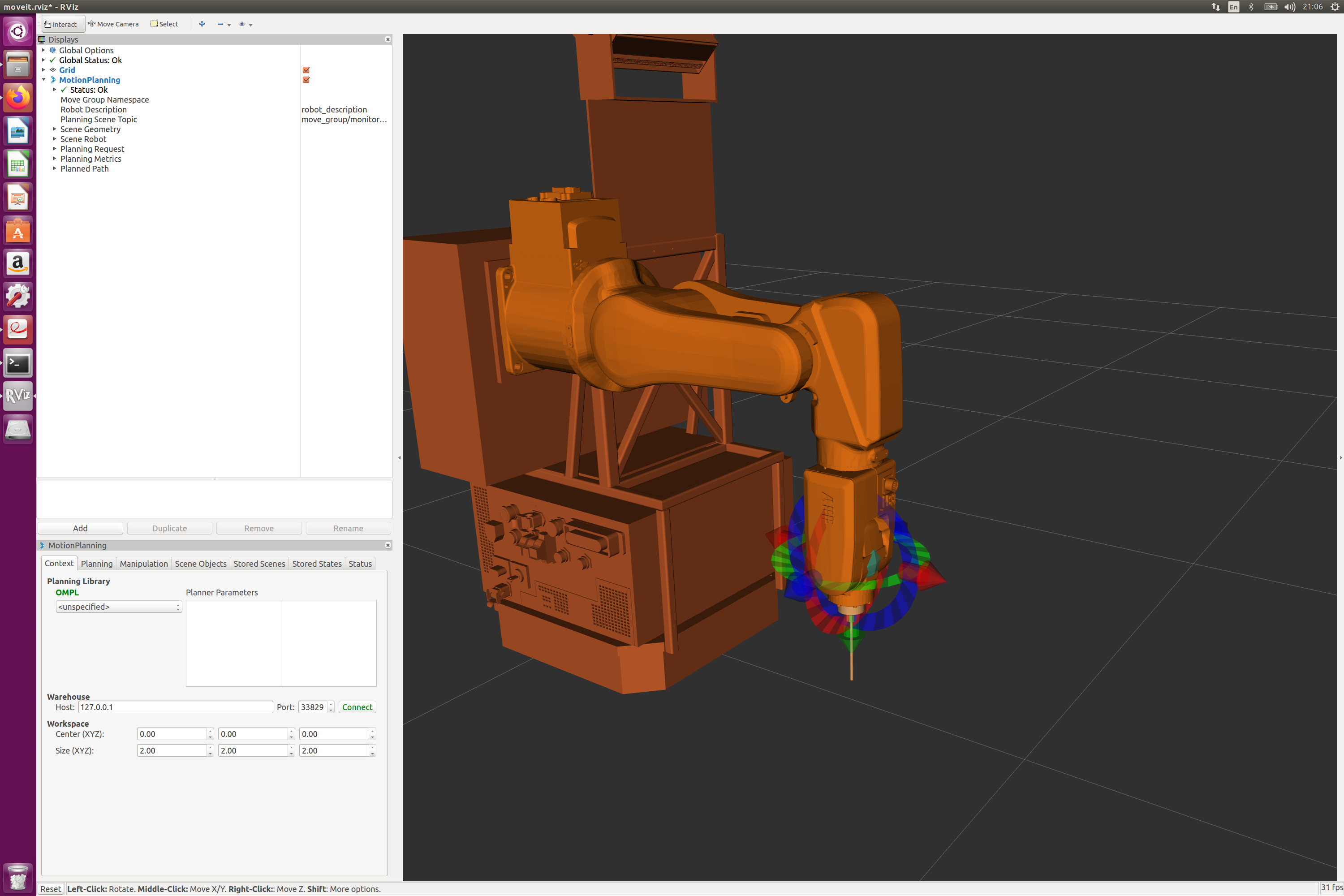
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi, i want to move the planner marker to the tip of the needle
As Felix already pointed out, it is possible to have even multiple markers by defining multiple end_effectors:
<end_effector name="tool_mount" parent_link="tool_mount" group="hand" parent_group="arm"/>
<end_effector name="tool_tip" parent_link="tool_tip" group="hand" parent_group="arm"/>

At the moment, it looks like you have two options. For both of these you first need to define a link in your URDF at which you want the marker to be placed, e.g. your_robot_tool_point_link.
Define your robot planning group using a chain of links like this in the SRDF, and have no end effector for this group:
<group name="your_robot">
<joint name="your_robot_joint_1" />
<joint name="your_robot_joint_2" />
<joint name="your_robot_joint_3" />
<joint name="your_robot_joint_4" />
<joint name="your_robot_joint_5" />
<joint name="your_robot_joint_6" />
<chain base_link="your_robot_base_link" tip_link="your_robot_tool_point_link" />
</group>
The marker will be placed at the tip_link frame if no end effector has this group as its parent, or has one of the links set as its parent_link.
If you define an end effector group in your SRDF, the interactive marker will be placed at the parent_link, so you can write this:
<end_effector name="your_robot_ee_name" parent_link="your_robot_tool_point_link" group="your_robot_ee_group" parent_group="your_robot" />
If you want multiple interactive markers on your robot, you can define multiple end_effector tags that use the same your_robot_ee_group. If you don't have a group, you can define this hacky one, although you can't use this to plan:
<group name="your_robot_dummy_group">
<joint name="your_robot_joint_1" />
</group>
Asked: 2020-04-29 08:08:17 -0500
Seen: 225 times
Last updated: May 14 '20
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
Quick comment: the coordinate planner is actually called an interactive marker. That may help finding documents/discussions/previous Q&As about it.
Would you have an idea of how to move this interactive marker to the tip of the needle?