
Modify ABB IRB 120 URDF Model
I want to add a gripper-like model to the end of the IRB 120 robot URDF so that the end of the robot isn't just a flange as seen in moveit!
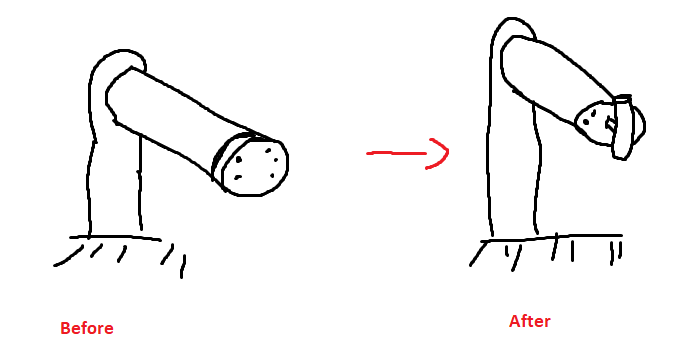
Basically, the IRB 120 model looks like the left image with just an open-end flange that rotates when I play with it in moveit!. I want to model a 3D cylindrical part to attach to the end of this flange which looks similar to the right image. How do I go about editing the irb120_3_58 xacro or urdf file to make this change?
add a comment
