
How to understand robot_radius in costmap parameters and inflation_radius in inflation_layer?
When I just set inflation_radius to 0.5 in inflation_layer, the generated costmap looks like this in rviz:

When I add the global parameter robot_radius to 0.2 in the costmap, the generated costmap looks like this in rviz:
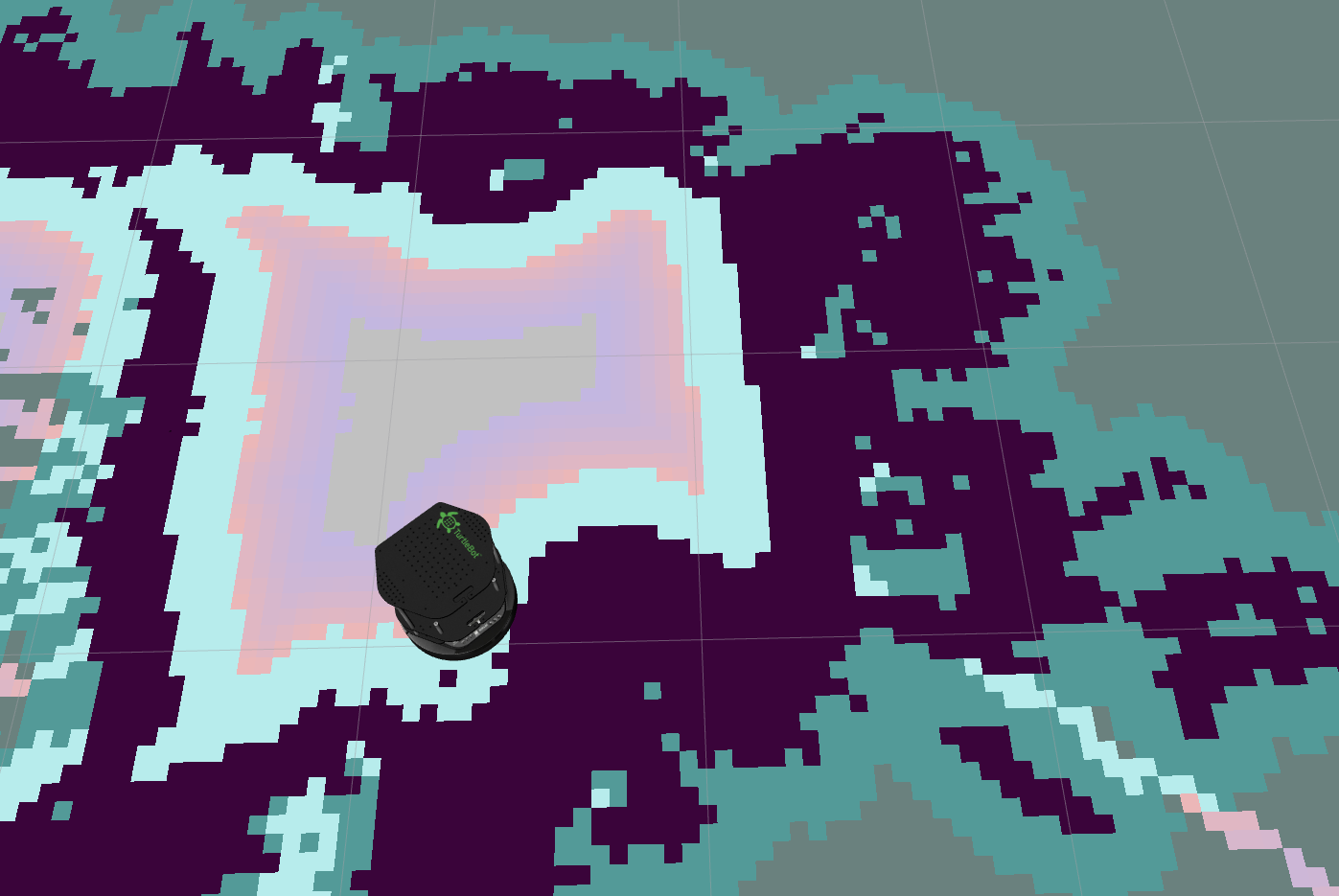
It seems that the area originally belonging to inflation_radius is narrowed. Moreover, during the navigation process, I found that the robot could not enter the area of inflation_radius.
What I want to ask is:
1) Is it possible to set inflation_radius to the radius of the robot without setting the value of robot_radius while ensuring safe navigation (without hitting obstacles and boundaries)?
2) Why does costmap have both global parameter robot_radius and inflation_layer plugin parameter inflation_radius? Is this redundant, or are there any other considerations for this setting?

