
Husky Gazebo robot_state_publisher not broadcasting transforms
I'm trying to record a bag from the Husky Gazebo simulation for Cartographer SLAM on Kinetic and Ubuntu 18.04 VM. The problem I'm facing is that some of the TF transforms are not being included in the bag file. Here's the steps I took:
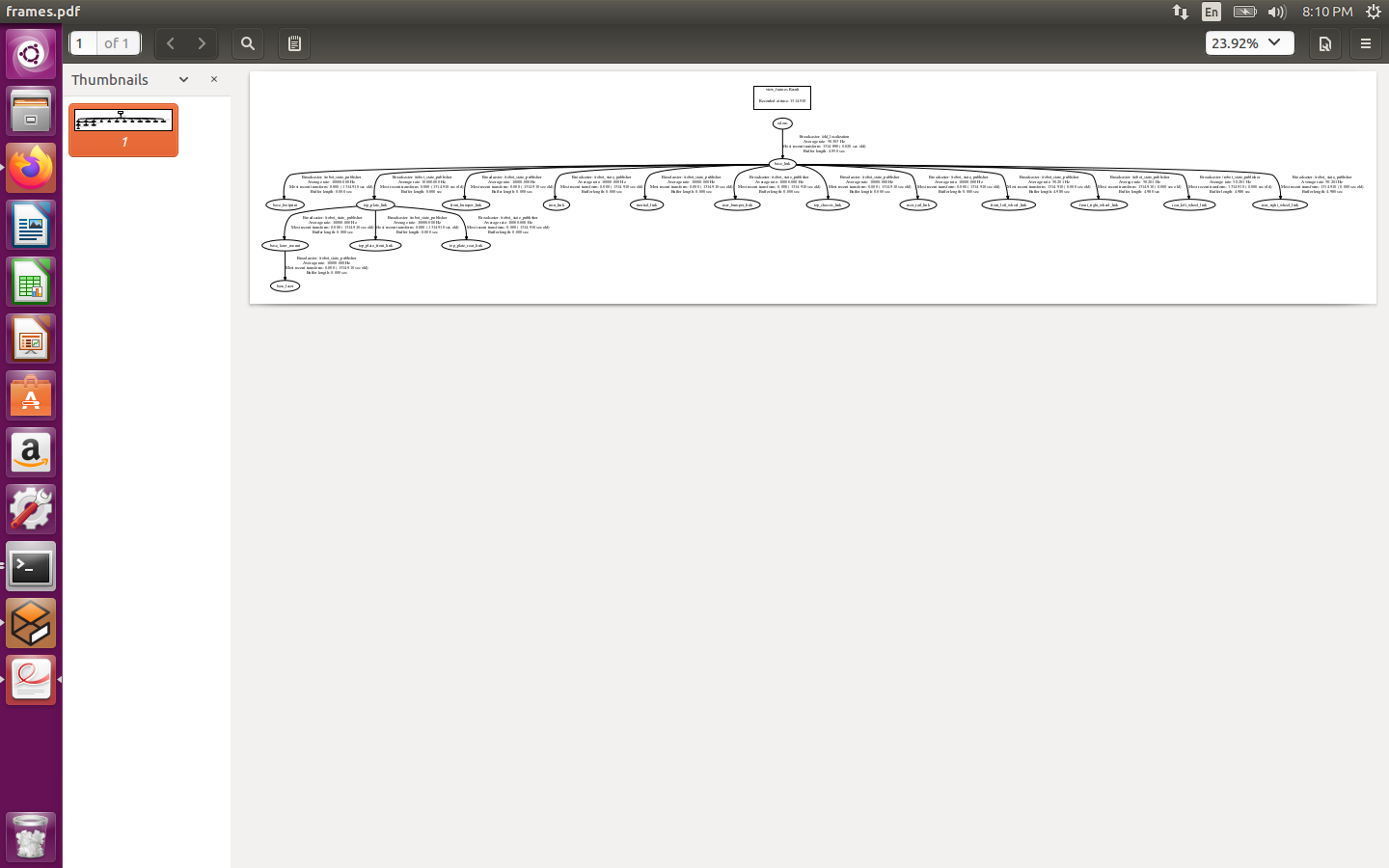
Launch the simulator: roslaunch husky_gazebo husky_playpen.launch This correctly launches the simulator. I can control it with key_teleop and tf/view_frames gives this result:
 Here's a close up of the problem area:
Here's a close up of the problem area: 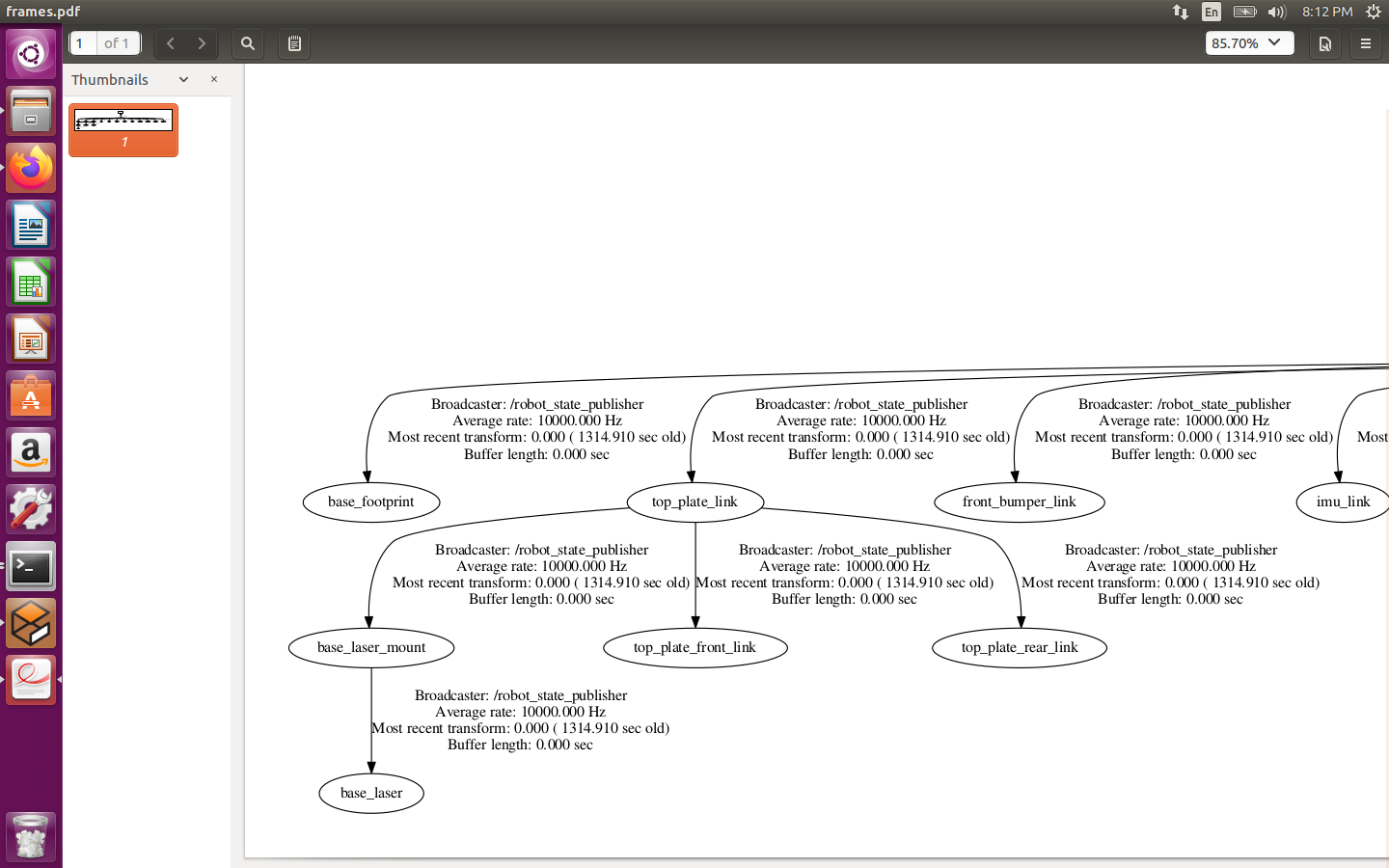 When I record a bag with
When I record a bag with rosbag record -O Husky /tf /odometry/filtered /scan I can successfully record the messages and drive the robot around to get simulated data for SLAM, but when playing it back, tf/view_frames looks like this: 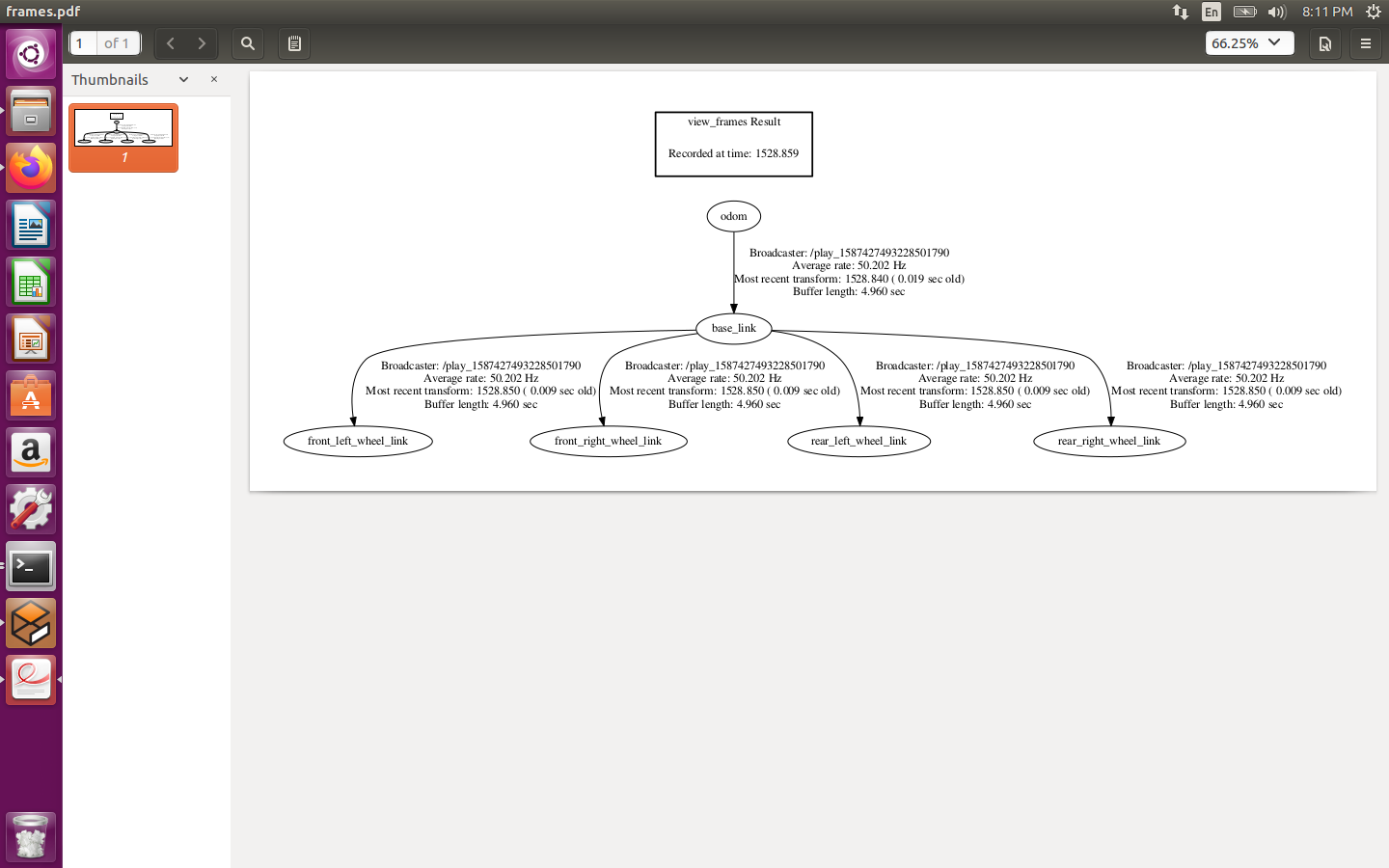 The TF tree is missing large parts, including the base_laser link, which is the one I need. I think the error is that
The TF tree is missing large parts, including the base_laser link, which is the one I need. I think the error is that robot_state_publisher is not sending out TF transforms. Even though the average rate is 10,000 hz, the last message was registered as 1300 seconds before, even though the simulator hasn't been up that long. How do I resolve this so that those transforms are included in the bag? It doesn't appear to be dying in the console, here's the output when I start the sim:
process[gazebo-1]: started with pid [9282]
process[gazebo_gui-2]: started with pid [9287]
process[base_controller_spawner-3]: started with pid [9292]
process[ekf_localization-4]: started with pid [9293]
process[twist_marker_server-5]: started with pid [9299]
process[robot_state_publisher-6]: started with pid [9309]
process[twist_mux-7]: started with pid [9319]
process[spawn_husky_model-8]: started with pid [9327]
[ INFO] [1587427802.385761428]: [twist_marker_server] Initialized.
[ INFO] [1587427802.503502938]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1587427802.504856515]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1587427802.539750475]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1587427802.541527633]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1587427803.728679997, 1298.500000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1587427803.811557590, 1298.570000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
Warning [parser_urdf.cc:1232] multiple inconsistent <gravity> exists due to fixed joint reduction overwriting previous value [true] with [false].
[ INFO] [1587427804.993717048, 1298.670000000]: Laser Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1587427804.993776607, 1298.670000000]: Starting Laser Plugin (ns = /)
[ INFO] [1587427804.995091901, 1298.670000000]: Laser Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1587427805.019063308, 1298.670000000]: Physics dynamic reconfigure ready.
[ INFO] [1587427805.020134181, 1298.670000000]: Physics dynamic reconfigure ready.
[ INFO] [1587427805.107275723, 1298.670000000]: Loading gazebo_ros_control plugin
[ INFO] [1587427805.107442330, 1298.670000000]: Starting gazebo_ros_control plugin in namespace: /
[ INFO] [1587427805.108631669, 1298.670000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [robot_description] on the ROS param server.
[ERROR] [1587427805.223508597, 1298.670000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/front_left_wheel
[ERROR] [1587427805.225517904, 1298.670000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/front_right_wheel
[ERROR] [1587427805.227545101, 1298.670000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rear_left_wheel
[ERROR] [1587427805.229322958, 1298.670000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rear_right_wheel
[ INFO] [1587427805 ...