
MoveIt! Planning Scene not subscribing to my PointCloud2 topic
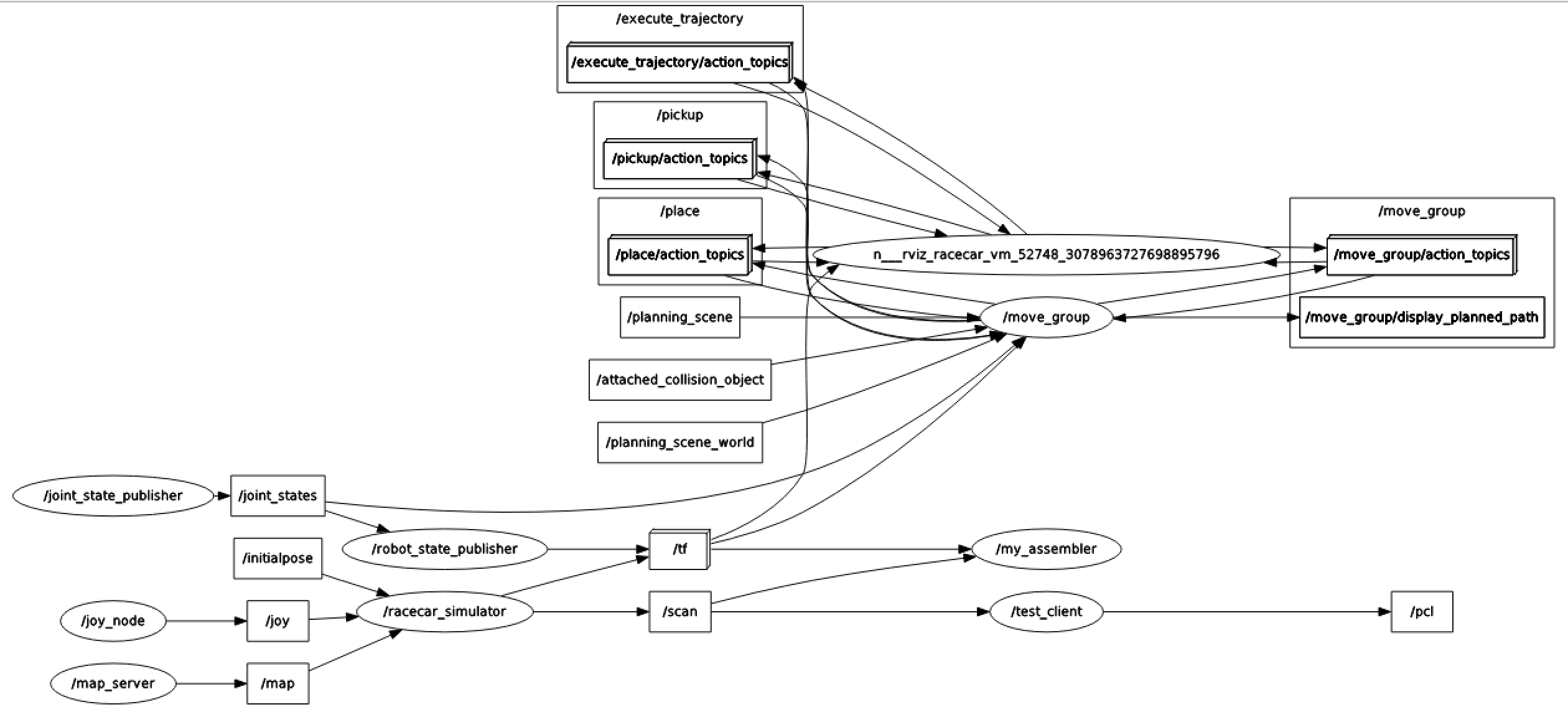
I am trying to configure my robot to generate an octomap from pointcloud data. However, nothing is subscribing to my PointCloud2 topic /pcl, and I can't see the Octomap in Rviz. I never got the MoveIt! perception pipeline tutorial to work either, but I'd rather get everything working with the robot I am working with. Below is my rqt_graph, MoveIt! launch file, robot srdf file, and sensor config file.
I am getting the following warnings and errors when I launch MoveIt!, but they don't seem related to the mapping issue.
[ WARN] [1585920130.476557339]: Could not identify parent group for end-effector 'robot'
[ WARN] [1585920130.547927589]: Kinematics solver doesnt support #attempts anymore, but only a timeout. Please remove the parameter '/rviz_racecar_vm_52748_3078963727698895796/robot/kinematics_solver_attempts' from your configuration.
[ERROR] [1585920130.606949006]: Group 'robot' is not a chain
[ERROR] [1585920130.607006233]: Kinematics solver of type 'kdl_kinematics_plugin/KDLKinematicsPlugin' could not be initialized for group 'robot'
[ERROR] [1585920130.607158661]: Kinematics solver could not be instantiated for joint group robot.
rqt_graph C:\fakepath\Screen Shot 2020-04-03 at 9.23.46 AM.png
demo.launch <launch>
<!-- Load the SRDF and other .yaml configuration files on the param server -->
<!-- The semantic description that corresponds to the URDF -->
<param name="robot_description_semantic" textfile="$(find racecar_moveit_config)/config/racecar.srdf" />
<!-- Sensors Functionality -->
<!-- Params for 3D sensors config -->
<rosparam command="load" file="$(find racecar_moveit_config)/config/sensors_3d.yaml" />
<!-- Params for the octomap monitor -->
<param name="octomap_frame" type="string" value="map" />
<param name="octomap_resolution" type="double" value="0.025" />
<param name="max_range" type="double" value="5.0" />
<!-- Start the actual move_group node/action server -->
<!-- move_group settings -->
<arg name="allow_trajectory_execution" default="false"/>
<arg name="max_safe_path_cost" default="1"/>
<arg name="jiggle_fraction" default="0.05" />
<arg name="publish_monitored_planning_scene" default="true"/>
<arg name="capabilities" default=""/>
<arg name="disable_capabilities" default=""/>
<node name="move_group" pkg="moveit_ros_move_group" type="move_group" respawn="false" output="screen">
<!-- Set the display variable, in case OpenGL code is used internally -->
<env name="DISPLAY" value="$(optenv DISPLAY :0)" />
<param name="allow_trajectory_execution" value="$(arg allow_trajectory_execution)"/>
<param name="max_safe_path_cost" value="$(arg max_safe_path_cost)"/>
<param name="jiggle_fraction" value="$(arg jiggle_fraction)" />
<param name="capabilities" value="$(arg capabilities)"/>
<param name="disable_capabilities" value="$(arg disable_capabilities)"/>
<!-- Publish the planning scene of the physical robot so that rviz plugin can know actual robot -->
<param name="planning_scene_monitor/publish_planning_scene" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_geometry_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_state_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_transforms_updates" value="$(arg publish_monitored_planning_scene)" />
</node>
<!-- Run Rviz and load the default config to see the state of the move_group node -->
<include file="$(find racecar_moveit_config)/launch/moveit_rviz.launch">
<arg name="rviz_config" value="$(find racecar_moveit_config)/launch/rviz_default.rviz"/>
</include>
<!-- Don't know if this is required but I read somewhere that it might be -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/>
</launch> ...add a comment

{kind=link}