
Moveit add gripper and arm to same action server
Hey there,
I have an action server named /position_trajectory_controller/follow_joint_trajectory/ to which my real kuka robot listens.
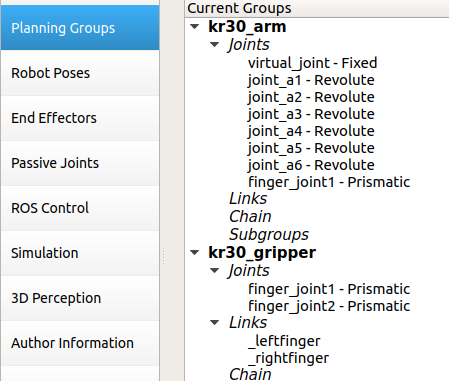
It is an action server which I would like to use to control the gripper and the arm. Thus it has these joint_states:
name: [finger_joint1, joint_a1, joint_a2, joint_a3, joint_a4, joint_a5, joint_a6]
Now on the moveit side I configured also an action server to control my robot as follows:
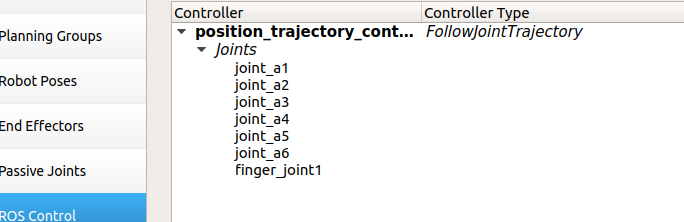
If I then start my pick place planning c++ program I get this error:
[ERROR] [1585814245.639666493]: IK cannot be performed for link 'link_6'. The solver can report IK solutions for link '_leftfinger'.
What I would like, is that moveit controlls finger_jonint 1 during the open / close gripper procedure and send these valus to the action server.
However I just was able to use moveit to control the robot arm not any additional joint (such as the gripper etc.).
Do I need an extra action server to control the gripper?
How could I achieve controlling a gripper and an arm with the same action server?
