Point cloud data appear in free space in stage_ros simulation
Hi everyone,
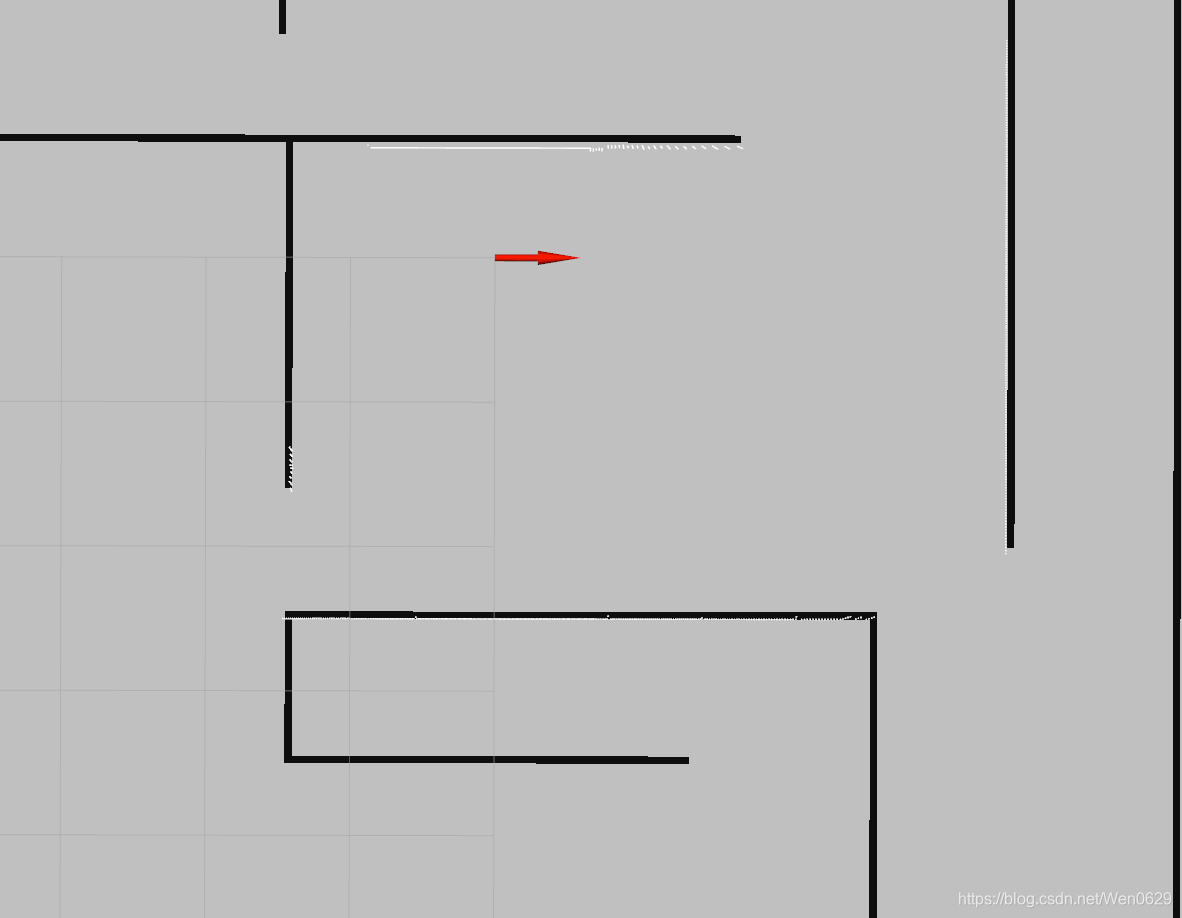
I am trying to simulate world model via stage_ros package. However, I found that there are simulated point cloud appearing in the free space, as shown in the figure below.
I found that the ranges of these laser scan points that should not appear are all 5.0m. However, the max range of range sensor is set to 30.0m in the .world file. So I am confused why this happens?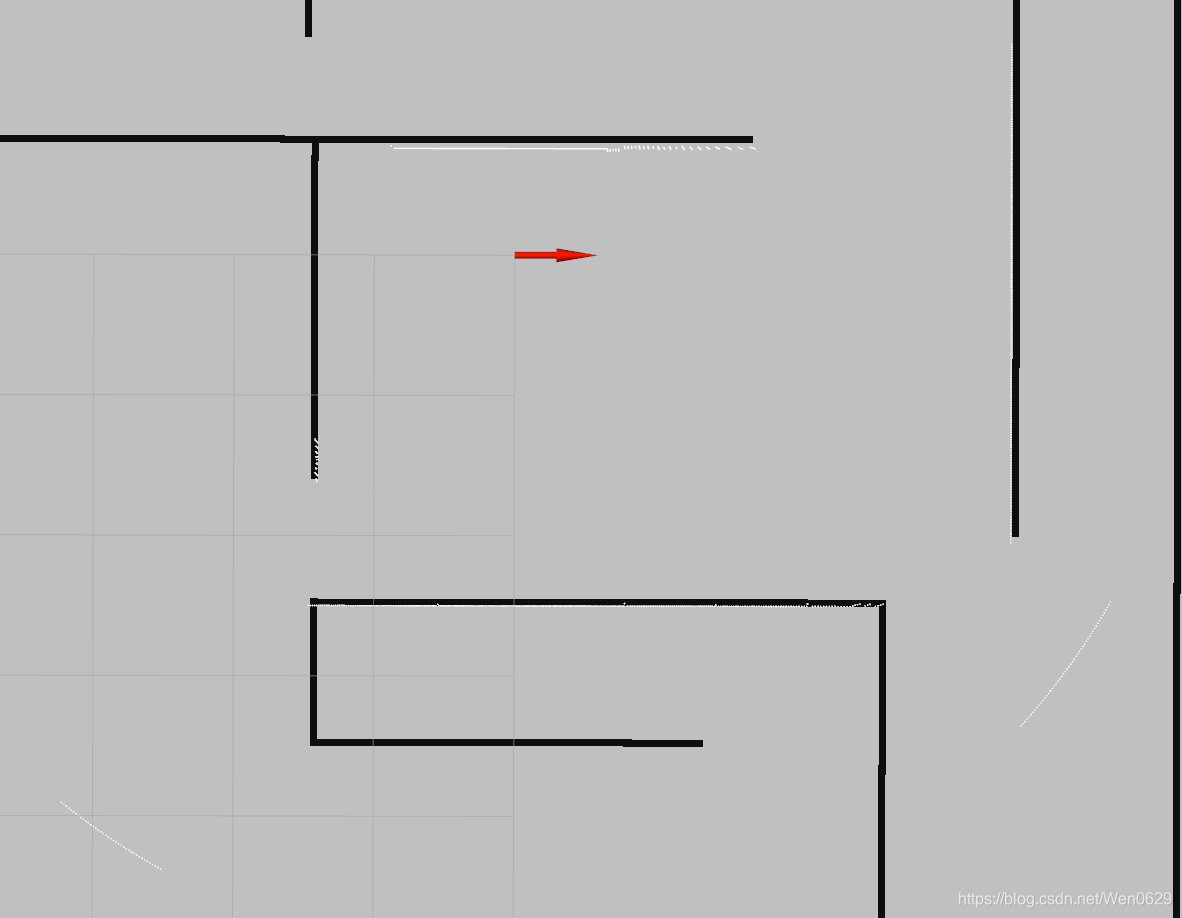
add a comment