
Urdf rgba displays strangely in rviz
I am doing the ROS urdf tutorials. Upon reaching the materials section I noticed that the alpha for rgba materials property is acting strange. For me if a=1.0 it is 50% transparent and if a=2.0 it is no longer transparent. This is bizarre to me as logically 0->1 should be the transparency range as with the rgb portion of rgba.
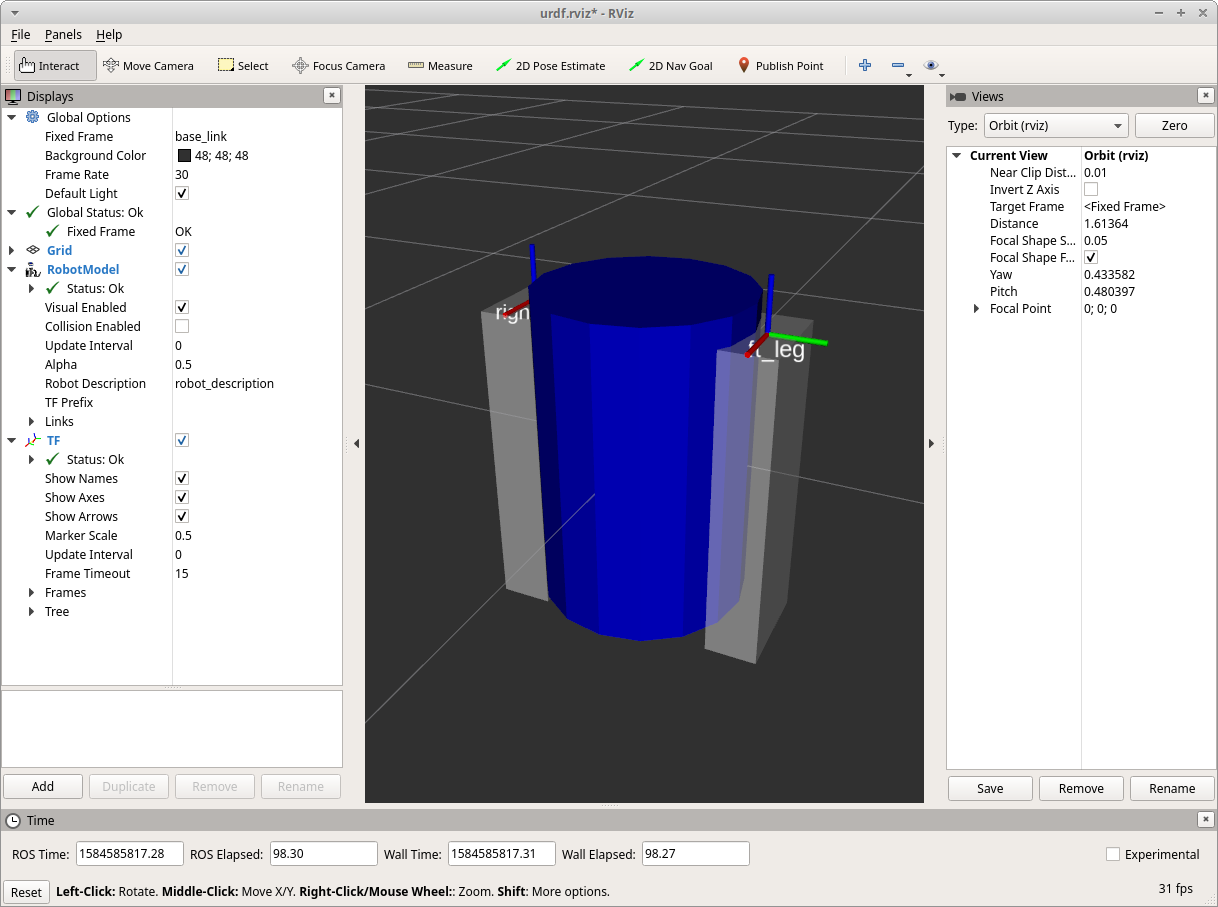
Below is the urdf I used and a screenshot of the display on rviz. Anyone have an explanation?
<?xml version="1.0"?>
<robot name="myfirst">
<material name="blue">
<color rgba="0 0 0.8 2"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name ="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name ="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
</robot>
add a comment
