
imm_ukf_pda_track error
Hi!
I' trying to perform tracking with autoware (version 1.12.0) and the lgsvl simulator (version 20.01).
I have the point cloud and euclidian cluster running well. Then, I proceed running the roslaunch lidar_tracker imm_ukf_pda_tracker.launch. However I got no output under the /detection/object_tracker/* topics.
Also, running the lidar_tracker imm_ukf_pda_tracker.launch results in lots of erros as below:
process[ukf_track_relay_01-3]: started with pid [1461]
[ERROR] [1582548650.221744610]: Lookup would require extrapolation into the past. Requested time 1582548276.277444864 but the earliest data is at time 1582548649.225498201, when looking up transform from frame [velodyne] to frame [world]
[ INFO] [1582548650.221785276]: Could not find coordiante transformation
[ERROR] [1582548651.222754904]: Lookup would require extrapolation into the past. Requested time 1582548276.987444224 but the earliest data is at time 1582548649.225498201, when looking up transform from frame [velodyne] to frame [world]
[ INFO] [1582548651.222778187]: Could not find coordiante transformation
[ERROR] [1582548652.228415645]: Lookup would require extrapolation into the past. Requested time 1582548277.687443456 but the earliest data is at time 1582548649.225498201, when looking up transform from frame [velodyne] to frame [world]
[ INFO] [1582548652.228460558]: Could not find coordiante transformation
[ERROR] [1582548653.230826125]: Lookup would require extrapolation into the past. Requested time 1582548278.567442688 but the earliest data is at time 1582548649.225498201, when looking up transform from frame [velodyne] to frame [world]
[ INFO] [1582548653.231090351]: Could not find coordiante transformation
[ERROR] [1582548654.241142147]: Lookup would require extrapolation into the past. Requested time 1582548279.437441792 but the earliest data is at time 1582548649.225498201, when looking up transform from frame [velodyne] to frame [world]
[ INFO] [1582548654.241166545]: Could not find coordiante transformation
And so on..
I had run rosrun tf view_frames during the execution to get the /tf structure, and got the following:
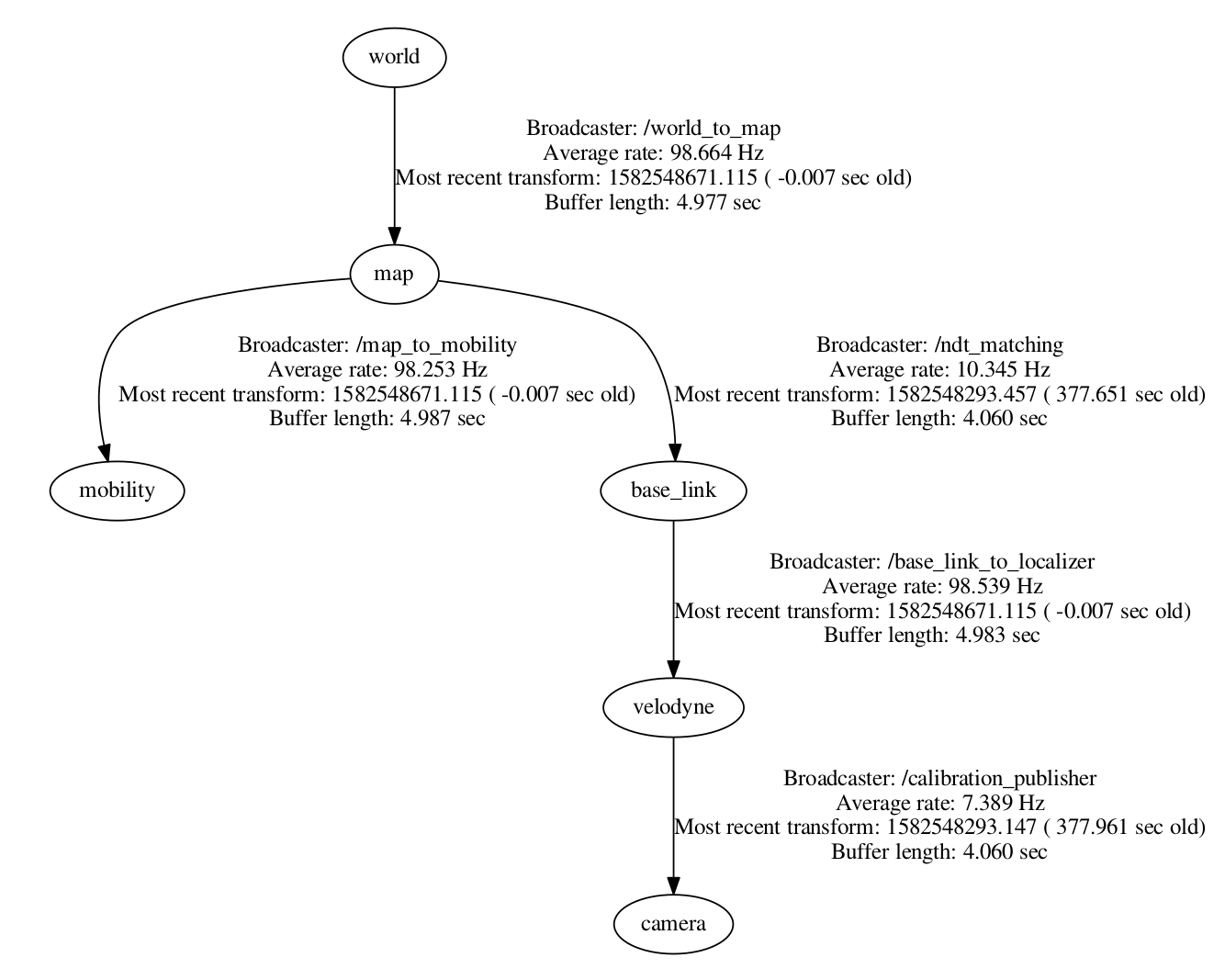
Don't kow why the /ndt_matching most recent transform is so old. Can that be a problem?
If I check the active nodes/topics with rqt, the ndt_matching still appears as a publisher into the /tf topic:

Can someone please help to understand why this error occurs? Am I missing something?
Thank you very much.
Update I
I restarted everything from scratch. This time I initialized the euclidian_cluster and the imm_ukf_pda modules before using the estimate 2D pose (required for the ndt_algorithm to work with lgsvl since the gps coordinates are from outside japan). For this reason, naturally, I got the following error:
[ERROR] [1582640012.503829801]: Could not find a connection between 'world' and 'velodyne' because they are not part of the same tree.Tf has two or more unconnected trees.
Then when I placed the estimation pose, the ndt_algorithm could find itself, create the link between [world] and [velodyne], and I saw the tracking working in RViz for a few seconds. Some boxes appeared around cars and trees with the velocity/speed aside (I think that was the goal, right?). However, after a few seconds the same error comeback
[ERROR] [1582640028.598171054]: Lookup would require extrapolation into the past. Requested time 1582640001.163042816 but the earliest ...
I add an update that might help you to help me. Thanks.