
Suggestion on how to drive a robot to an Aruco marker.

Hello
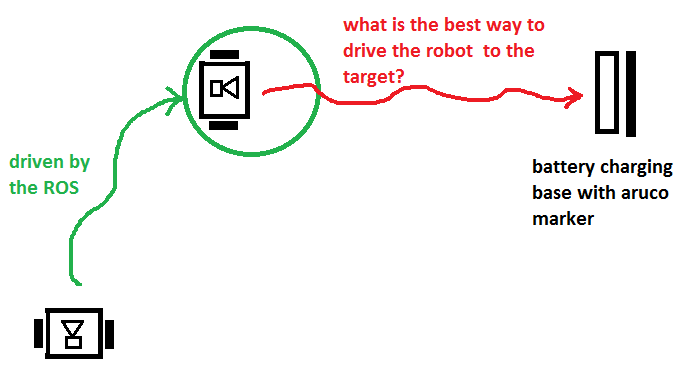
I intend to build a base to recharge the batteries of a differential robot that implements ROS for autonomous navigation. Currently, my robot has a PI Camera and can locate an Aruco marker by turning on itself. With a raspberry pi 4, I get a rate of 60 fps with a resolution of 640x480. My question is, what is the best way to make the robot approach the recharge base, observing an Aruco marker:
- Maybe using a PID controller
- Estimate the distance and orientation that the robot is in relation to the marker and publish goals in the odometry frame and let the ROS guide the robot to the goal
- other way..
Has anyone implemented something similar and could give me a suggestion?
thanks.

Hey, were you able to find an implementation for the same?