
joint_state_publisher: UnicodeEncodeError: 'ascii' codec can't encode character u'\u0130' in position 28396: ordinal not in range(128)
Robot : Eva Robot OS: ubuntu 16.04 /kinetic
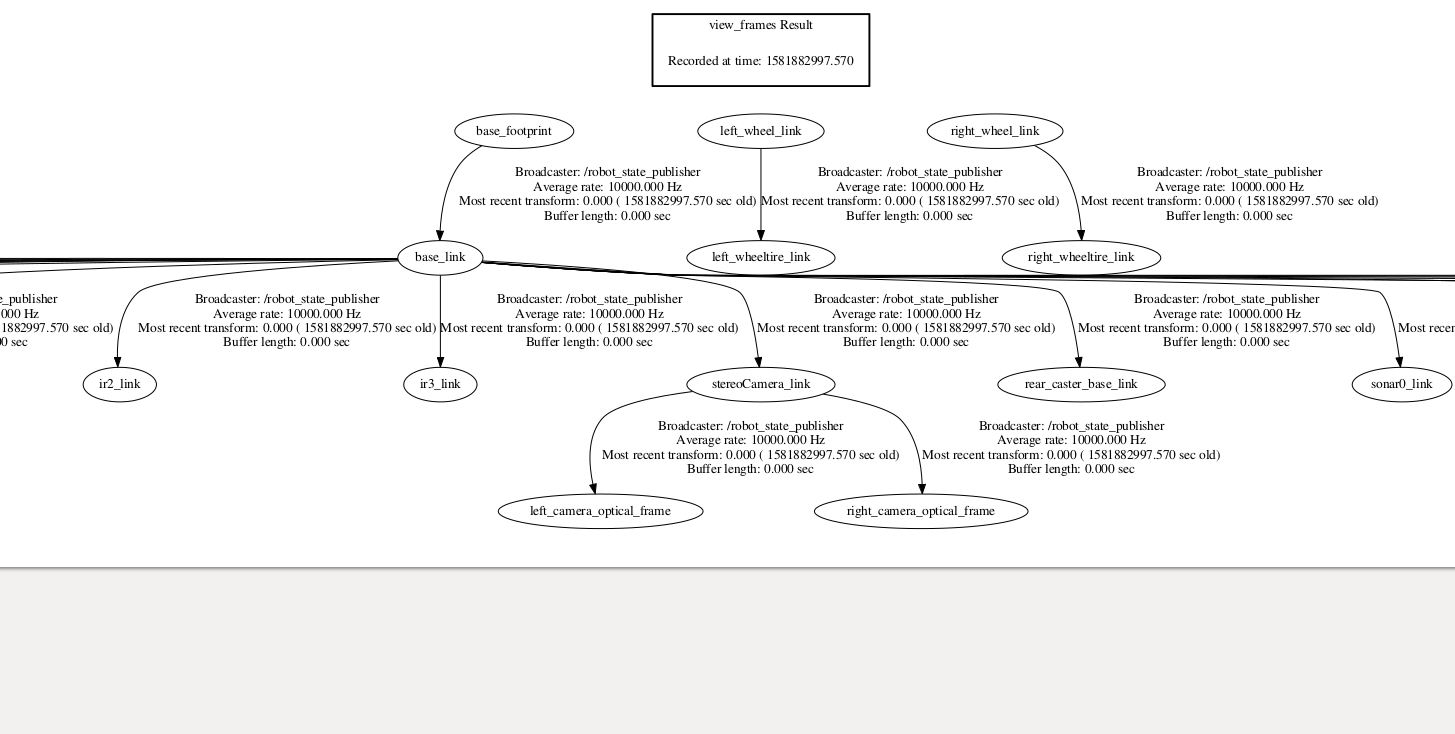
I start working on a real-state robot. i was able to link the robot on my workstation and i can see all the topics on my work station. however, for visualizing the robot on rviz i can see all the joints links but not the wheels .wheels will be separated (i attached my TF tree). for launching my real-state robot I use launch file with the urdf and two nodes (robot_state_publisher , joint_state publisher ). joint state publisher alwayes give me the below error :
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/joint_state_publisher/joint_state_publisher", line 44, in <module>
jsp = joint_state_publisher.JointStatePublisher()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/joint_state_publisher/__init__.py", line 157, in __init__
robot = xml.dom.minidom.parseString(description)
File "/usr/lib/python2.7/xml/dom/minidom.py", line 1928, in parseString
return expatbuilder.parseString(string)
File "/usr/lib/python2.7/xml/dom/expatbuilder.py", line 940, in parseString
return builder.parseString(string)
File "/usr/lib/python2.7/xml/dom/expatbuilder.py", line 223, in parseString
parser.Parse(string, True)
UnicodeEncodeError: 'ascii' codec can't encode character u'\u0130' in position 28396: ordinal not in range(128)
[joint_state_publisher-3] process has died [pid 7032, exit code 1, cmd /opt/ros/kinetic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher
__log:=/home/moh/.ros/log/638a2d20-50f6-11ea-8fb1-983b8fb9a8e3/joint_state_publisher-3.log].
log file: /home/moh/.ros/log/638a2d20-50f6-11ea-8fb1-983b8fb9a8e3/joint_state_publisher-3*.log
My real state launch file:-
<?xml version="1.0"?>
<launch>
<arg name="robot_ns" default="/"/>
<node pkg="robot_state_publisher" name="robot_state_publisher" type="state_publisher"/>
<param name="robot_description" textfile="$(find evarobotmodel_description)/urdf/evarobotmodel.urdf"/>
<param name="publish_frequency" type="double" value="10.0"/>
<param name="tf_prefix" type="string" value="$(arg robot_ns)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" type="bool" value="false"/>
</node>
</launch>
My TF tree:-
note: the previous Urdf works fine with gazebo . so I'm not sure if its URDf problem or joint _state _publisher issue.
kindly advise how to correctly see my robot in RVIZ and have the correct TF tree?
urdf file :
<?xml version="1.0" encoding="UTF-8"?>
<robot name="evarobotmodel">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<!--BASE -->
<link name="base_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.4 0.3 0.3"/>
</geometry>
</collision>
<visual>
<origin xyz="0.065 -0.11 -0.15" rpy="0 0 0"/>
<geometry>
<mesh filename="package://evarobotmodel_description/meshes/base.dae"/>
</geometry>
<material name="Gazebo/Black"/>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0 ...
