
raspicam Camera image has dark area after calibration
I have ROS Kinetic running on a raspberry pi 3 b+, with a raspicam. I have calibrated it, and along with the raspicam_node, I'm also running a transform. I also have the ca_driver running for the Create 2 the raspicam is mounted on:
roslaunch ca_driver create_2.launch
roslaunch raspicam_node camerav2_1280x960_10fps.launch
rosrun tf static_transform_publisher 0 0 0 0 0 0 base_link raspicam 100
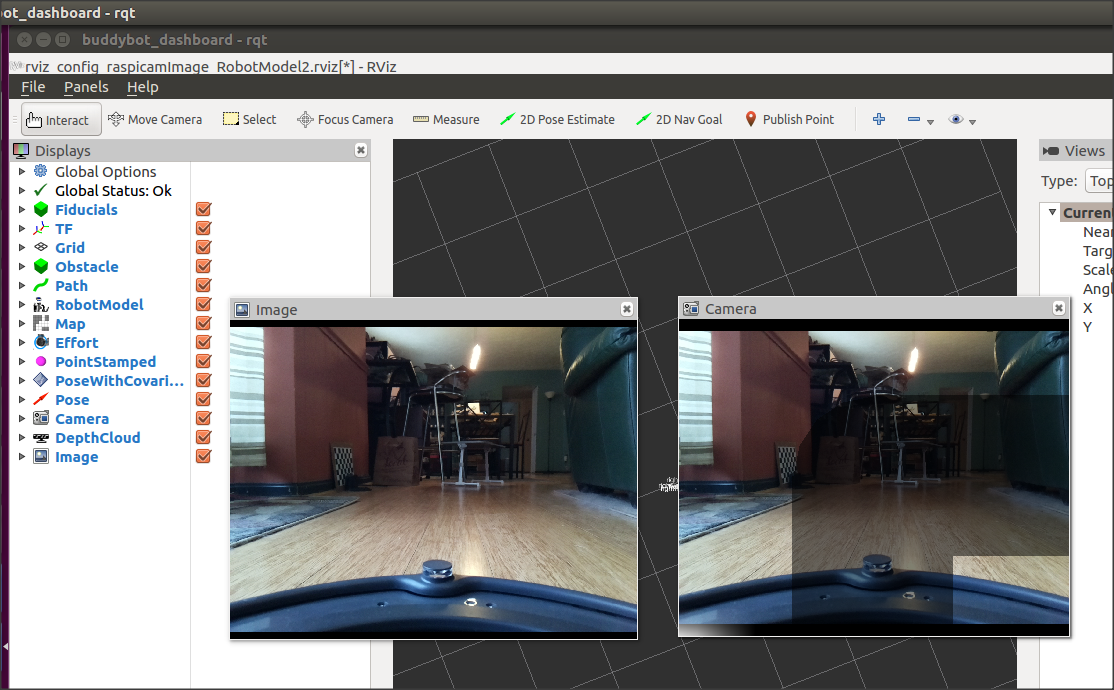
I then run rqt, and open my config.
Everything works, but the Camera has a dark area in it, while the Image does not.
Any ideas why the Camera would have this dark area?
Is this from a less than great calibration?
Is it an artifact from the transform?
FYI, I used an 11.5x8 size for the calibration checkerboard. It is visible in the camera images, on the left against the wall.
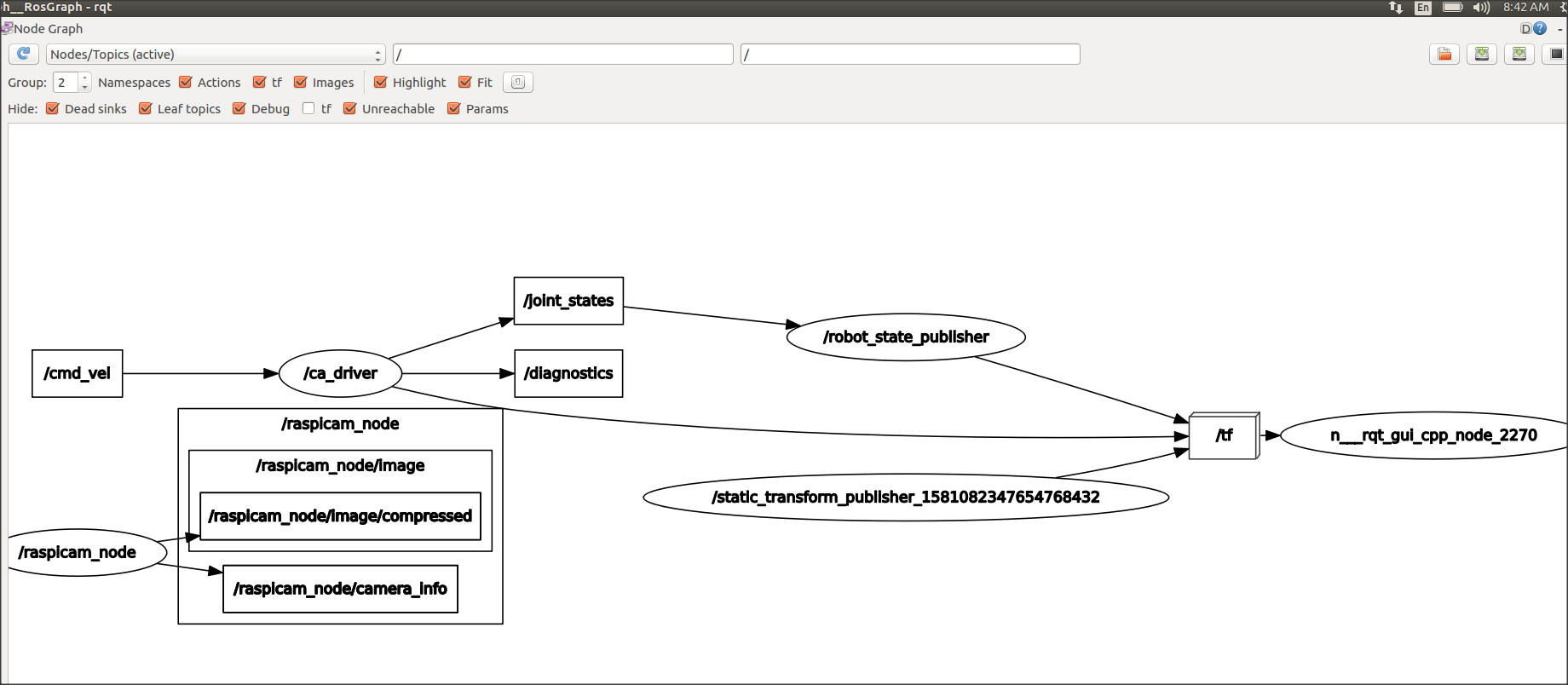
rqt_graph shows:
rosrun rqt_graph rqt_graph
add a comment
