Could not save point cloud map from rtabmap
Hi!
I tried to generate a 3D mapping using fetch in gazebo simulation using rtabmap, and I was able to open the rtabmap.db file. Although I could see the map when I open the file with "rtabmap ~/.ros/rtabmap.db," I cannot export as ply. The error is:
Could create clouds for 104 node(s). You may want to activate clouds regeneration option.
When I check the regeneration option in the export console, the error becomes:
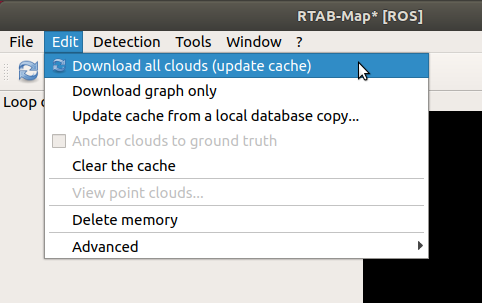
Could not create clouds for 188 node(s). The cache may not contain point cloud data. Try re-downloading the map.
The launch file I used for mapping is:
<launch>
<!-- Kinect cloud to laser scan -->
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/head_camera/depth_registered/image_raw"/>
<remap from="camera_info" to="/head_camera/depth_registered/camera_info"/>
<remap from="scan" to="/base_scan"/>
<param name="range_max" type="double" value="4"/>
</node>
<!-- SLAM -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_link"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<remap from="odom" to="/odom"/>
<remap from="scan_cloud" to="/head_camera/depth_registered/points"/>
<remap from="rgb/image" to="/head_camera/rgb/image_raw"/>
<remap from="depth/image" to="/head_camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/head_camera/rgb/camera_info"/>
<param name="queue_size" type="int" value="10"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/ProximityBySpace" type="string" value="false"/>
<param name="RGBD/AngularUpdate" type="string" value="0.01"/>
<param name="RGBD/LinearUpdate" type="string" value="0.01"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Vis/MinInliers" type="string" value="12"/>
</node>
<node pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform" type="bool" value="true"/>
<remap from="odom" to="/odom"/>
<remap from="scan_cloud" to="/head_camera/depth_registered/points"/>
<remap from="rgb/image" to="/head_camera/rgb/image_raw"/>
<remap from="depth/image" to="/head_camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/head_camera/rgb/camera_info"/>
</node>
</group>
</launch>
Thank you for your help!
add a comment