
RViz gets Moveit setup assistant's poses wrong
Hi,
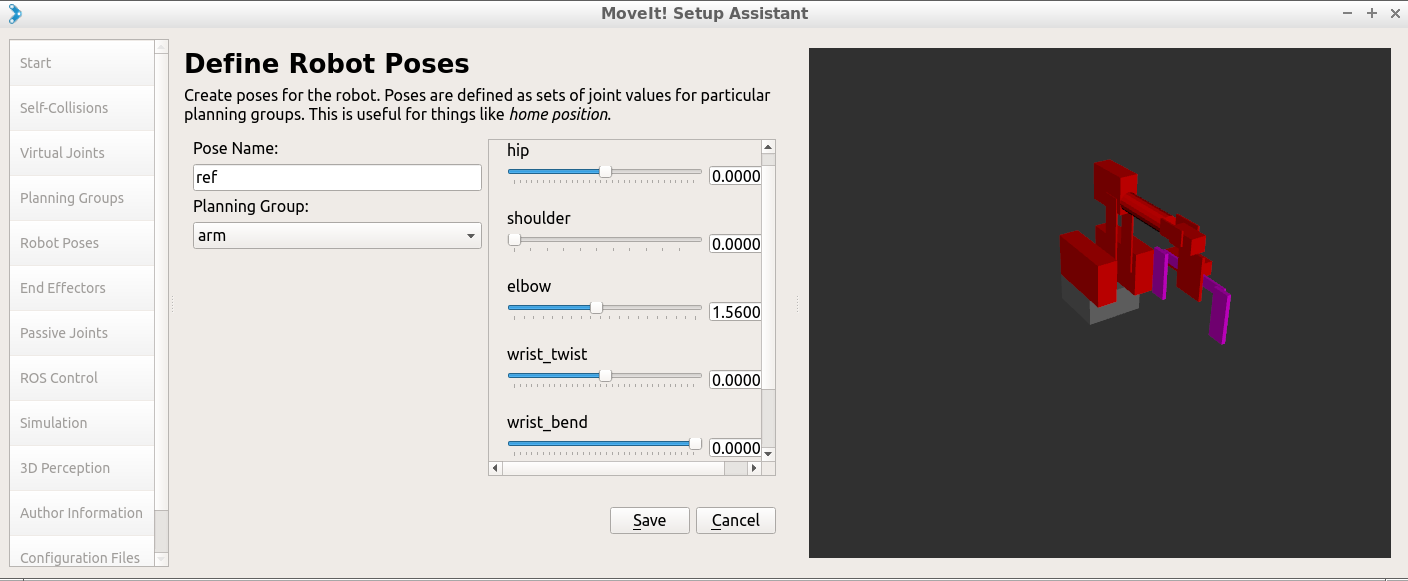
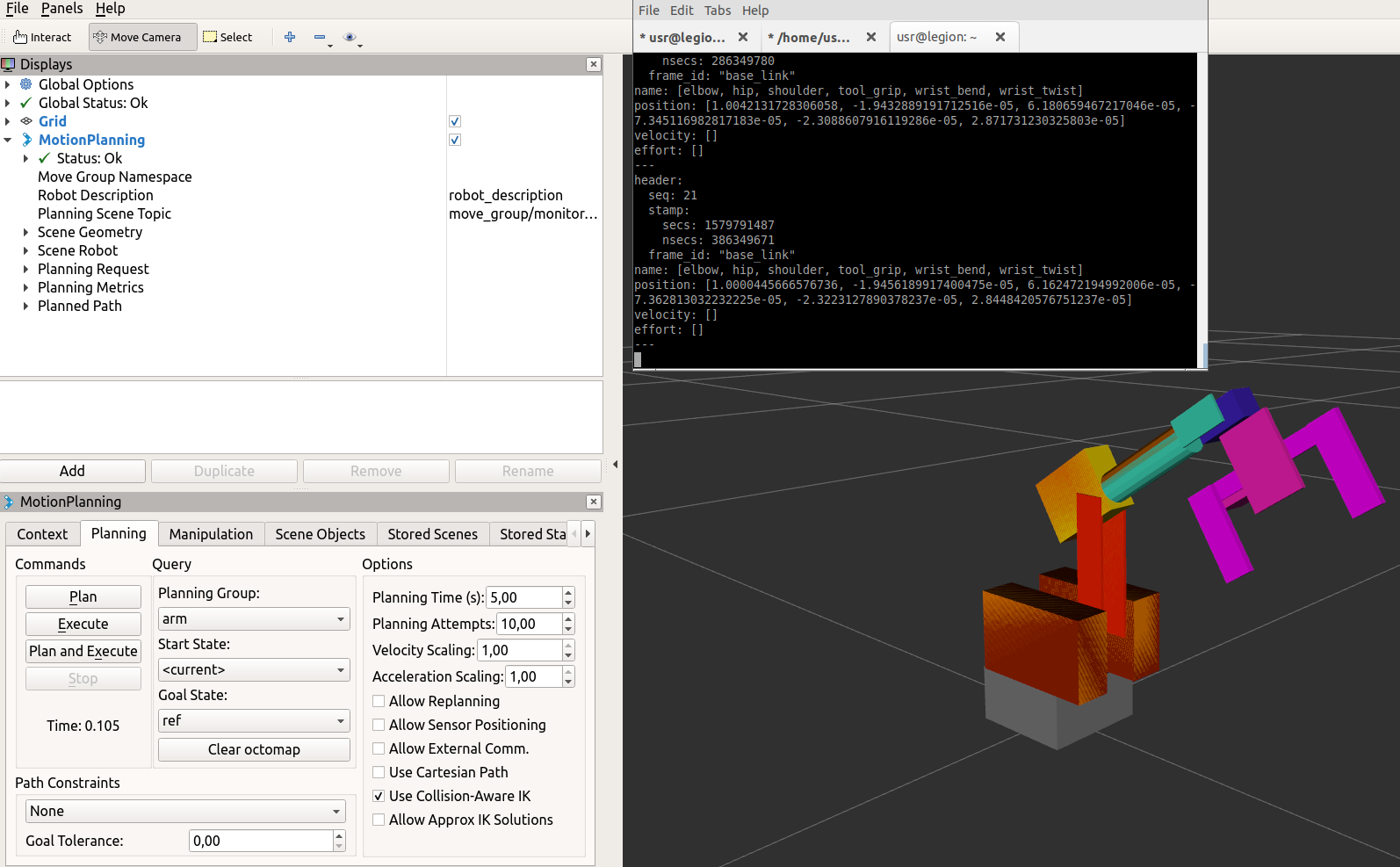
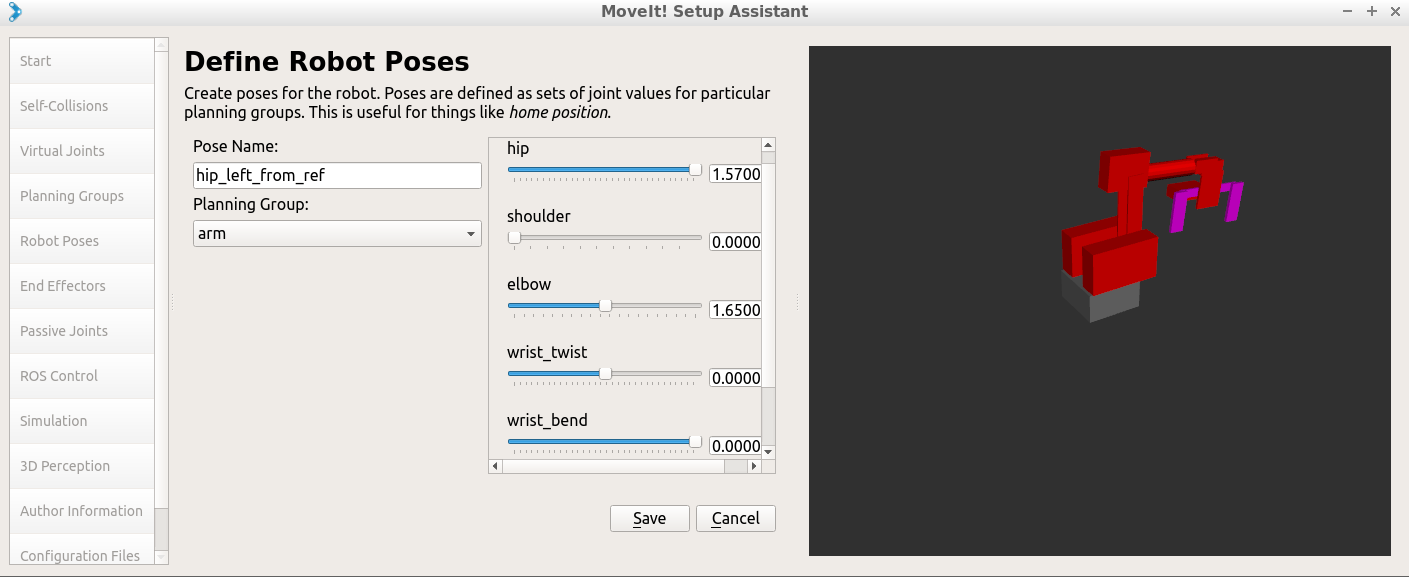
I have created a Moveit config package using the moveit_setup_assistant, containing several poses for my 6dof arm. However, when executing these poses using:
roslaunch simple6dofarm_config demo.launch rviz_tutorial:=true
The poses are wrong, as can be seen on these two comparisons for example:
 vs
vs
 And
And
 vs
vs
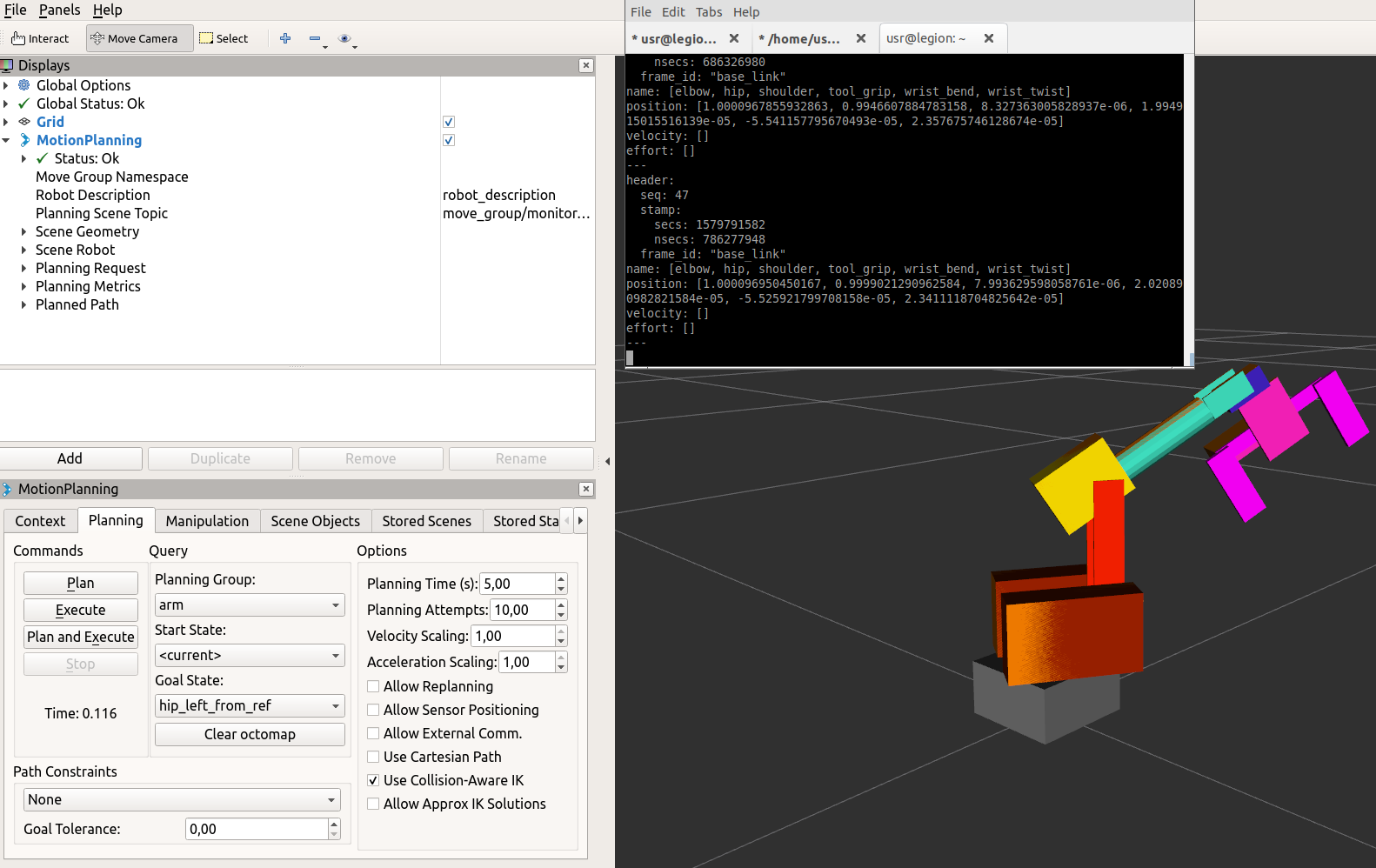
What's going on ?

And please attach your screenshots to the question directly. I've given you sufficient karma for that.