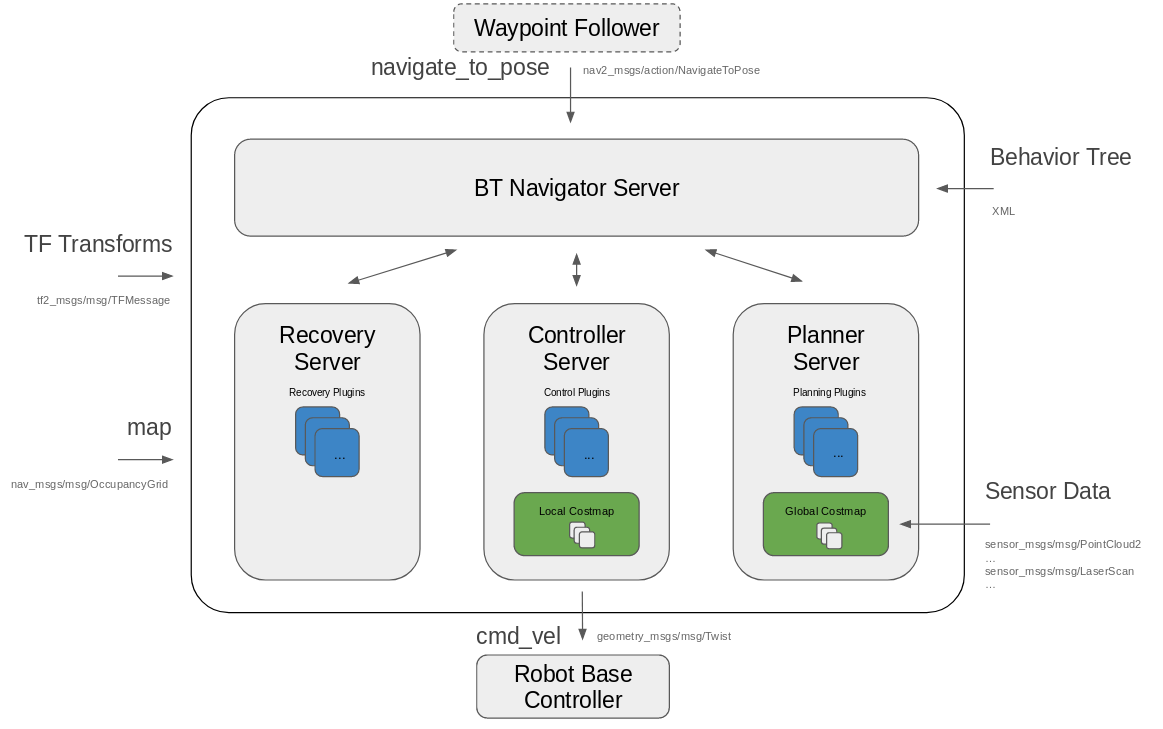
Architecture of the Navigaton2 stack
Hi, I am working on a report in school where i am describing the navigation2 stack briefly, and i would like to add a picture of the high-level architecture. This picture would been perfect, except the fact that i am writing about ros2 and navigation2.
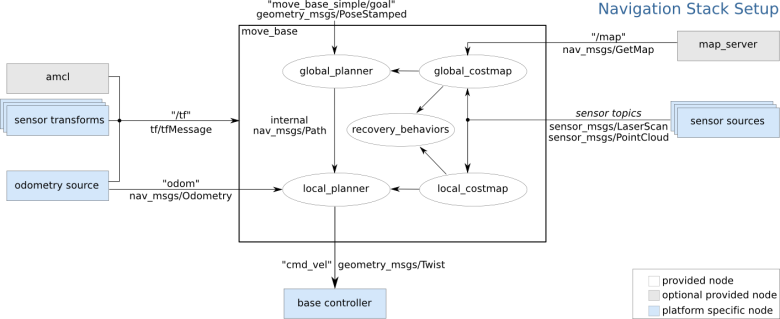
I have not been able to find an updated picture of the architecture (does anyone know if it exist?), but i found this one:
 on this page: https://github.com/ros-planning/navig...
It also state that:
on this page: https://github.com/ros-planning/navig...
It also state that:
In addition, move_base itself has been split into multiple components:
- nav2_bt_navigator (replaces move_base)
- nav2_navfn_planner (replaces global_planner)
- nav2_dwb_controller (replaces local_planner)
As i have not been able to find a picture, i was thinking to create my own, but i need to be sure about the changes before i do so. Is local planner (now: nav2_dwb_controller) and global planner (nav2_navfn_planner) now moved outside the square box (now: nav2_bt_navigator), and the box consists of only global costmap, local costmap and recovery behaviour? or is the architecture changed completely?
I am just briefly explaining the navigation stack and what information is required for this to work, so this is why i have not too much knowledge of how the different components work.
Thank you for any answers! :)